Multivariable Calculus: Inverse-Implicit Function Theorems: N N M F X
Multivariable Calculus: Inverse-Implicit Function Theorems: N N M F X
Download as pdf or txt
You might also like
- Solutions MunkresDocument77 pagesSolutions MunkresDiego Alejandro Londoño Patiño0% (1)
- OJT Evaluation FormDocument5 pagesOJT Evaluation FormLindy Jarabes PlanterasNo ratings yet
- Boardman Et Al. (2004)Document36 pagesBoardman Et Al. (2004)studenteuniversiteit100% (1)
- Homework 2 - Solution PDFDocument5 pagesHomework 2 - Solution PDFSamson ChanNo ratings yet
- Chapter 3 (Annotated - 1)Document26 pagesChapter 3 (Annotated - 1)Taylor ZhangNo ratings yet
- Instantaneous Rate of Change - The DerivativeDocument7 pagesInstantaneous Rate of Change - The DerivativeTrishul GyNo ratings yet
- Convex Functions: See P. 10 of The Handout On Preliminary MaterialDocument20 pagesConvex Functions: See P. 10 of The Handout On Preliminary MaterialClaribel Paola Serna CelinNo ratings yet
- Practice Midterm SolutionsDocument5 pagesPractice Midterm Solutions3dd2ef652ed6f7No ratings yet
- Advanced Micro I - Lecture 5 Outline: 1 Solving CPDocument3 pagesAdvanced Micro I - Lecture 5 Outline: 1 Solving CPcindyNo ratings yet
- Lecture Notes On Multivariable CalculusDocument36 pagesLecture Notes On Multivariable CalculusAnwar ShahNo ratings yet
- Lectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Document4 pagesLectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Amir DarabiNo ratings yet
- Analysis Distribution TH LecturesDocument79 pagesAnalysis Distribution TH Lecturespublicacc71No ratings yet
- Differential Calculus. Part 2 1 The Differential For Branch FunctionsDocument14 pagesDifferential Calculus. Part 2 1 The Differential For Branch FunctionscatalinNo ratings yet
- Implicit Function TheoremDocument4 pagesImplicit Function Theoremserialz dramazNo ratings yet
- The Random Variable Transformation (R.V.T.) : A Method For Computing The 1-p.d.f. Applications To ModellingDocument76 pagesThe Random Variable Transformation (R.V.T.) : A Method For Computing The 1-p.d.f. Applications To ModellingAinhoa AzorinNo ratings yet
- Convex OptimizationDocument108 pagesConvex OptimizationMontassar MhamdiNo ratings yet
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4Document10 pages2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4chejianglongNo ratings yet
- Lagrange Multipliers: Com S 477/577 Nov 18, 2008Document8 pagesLagrange Multipliers: Com S 477/577 Nov 18, 2008gzb012No ratings yet
- Stationary Points Minima and Maxima Gradient MethodDocument8 pagesStationary Points Minima and Maxima Gradient MethodmanojituuuNo ratings yet
- Week 3 Partial Derivatives, Chain Rule, Directional DerivativesDocument2 pagesWeek 3 Partial Derivatives, Chain Rule, Directional Derivativesstlonginus1942No ratings yet
- Real Analysis ProjectDocument14 pagesReal Analysis ProjectAnonymous bpmgNpv50% (2)
- Differential Equations Notes: Author Vincent HuangDocument16 pagesDifferential Equations Notes: Author Vincent HuangVincent HuangNo ratings yet
- Concave and Quasiconcave FunctionsDocument9 pagesConcave and Quasiconcave FunctionsceliusNo ratings yet
- Classical Mechanics The Lagrange Equation Derived Via The Calculus of VariationsDocument10 pagesClassical Mechanics The Lagrange Equation Derived Via The Calculus of VariationsabiNo ratings yet
- ASO Introduction To ManifoldsDocument36 pagesASO Introduction To Manifolds123 abcNo ratings yet
- 7-Convex OptimizationDocument34 pages7-Convex OptimizationTuấn ĐỗNo ratings yet
- Lectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Document4 pagesLectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Saurabh TomarNo ratings yet
- Calc VarDocument8 pagesCalc VarAreej FatimaNo ratings yet
- Chapter 4 Differ en Ti Able FunctionsDocument32 pagesChapter 4 Differ en Ti Able FunctionsJeffrey ChuahNo ratings yet
- Partial Derivatives and Differentiability: RemarkDocument4 pagesPartial Derivatives and Differentiability: RemarkSaurabh TomarNo ratings yet
- Partial Differentiation PDFDocument20 pagesPartial Differentiation PDFSarthak SharmaNo ratings yet
- Inversefunction THMDocument3 pagesInversefunction THMviralshortcomedyNo ratings yet
- ODE: Assignment-3Document7 pagesODE: Assignment-3VedprakashNo ratings yet
- Hw2sol PDFDocument5 pagesHw2sol PDFShy PeachD100% (1)
- Power Series and Differential Equations: The Method of FrobeniusDocument25 pagesPower Series and Differential Equations: The Method of Frobeniusomotoriogun samuelNo ratings yet
- Inv FCN THM Notes s18Document7 pagesInv FCN THM Notes s18sahlewel weldemichaelNo ratings yet
- 2060A Ex 1 2019Document4 pages2060A Ex 1 2019Samuel Alfonzo Gil BarcoNo ratings yet
- Review of Chapter 2Document17 pagesReview of Chapter 2digiy40095No ratings yet
- Problem Set 6 SolutionsDocument3 pagesProblem Set 6 SolutionsMengyao MaNo ratings yet
- Calculus 1 Topic 4Document9 pagesCalculus 1 Topic 4muradNo ratings yet
- Revised Course NotesDocument84 pagesRevised Course Notestangbowei39No ratings yet
- 1-Module-1 Complex Variables-21-01-2023Document20 pages1-Module-1 Complex Variables-21-01-2023Vashishta Kothamasu 21BCI0085No ratings yet
- 1 Linearisation & DifferentialsDocument6 pages1 Linearisation & DifferentialsmrtfkhangNo ratings yet
- Isi JRF Physics 07Document14 pagesIsi JRF Physics 07api-26401608No ratings yet
- Differential and Integral Calculus 2 - Homework 3 SolutionDocument6 pagesDifferential and Integral Calculus 2 - Homework 3 SolutionDominikNo ratings yet
- Lectures#5 9Document22 pagesLectures#5 9Jargalmaa ErdenemandakhNo ratings yet
- f06 Basic AdvcalcDocument2 pagesf06 Basic AdvcalcshottyslingNo ratings yet
- Lecture 12Document9 pagesLecture 12The tricksterNo ratings yet
- 1 The Derivative As A Rate of Change and As A Func-TionDocument6 pages1 The Derivative As A Rate of Change and As A Func-TionmrtfkhangNo ratings yet
- M 231 F 07 Handout 1Document5 pagesM 231 F 07 Handout 1Alonso Pablo Olivares LagosNo ratings yet
- Real 20Document4 pagesReal 20spadhiNo ratings yet
- Introduction of Frechet and Gateaux DerivativeDocument6 pagesIntroduction of Frechet and Gateaux DerivativeNiflheimNo ratings yet
- Lec6 Constr OptDocument30 pagesLec6 Constr OptDevendraReddyPoreddyNo ratings yet
- Differentiabilitate I+IIDocument64 pagesDifferentiabilitate I+IIVlad BuldurNo ratings yet
- 1.harmonic Function: 2.properties of Harmonic FunctionsDocument9 pages1.harmonic Function: 2.properties of Harmonic Functionsshailesh singhNo ratings yet
- Section 5Document3 pagesSection 5Victor RudenkoNo ratings yet
- 2018秋AppliedMath1 626046287Document2 pages2018秋AppliedMath1 626046287عبدالرحمن التميميNo ratings yet
- Chapter 5 (8 Lectures)Document21 pagesChapter 5 (8 Lectures)mayankNo ratings yet
- Extending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence DomainsDocument20 pagesExtending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence Domainstalvane.santos069No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and ApplicationsFrom EverandGreen's Function Estimates for Lattice Schrödinger Operators and ApplicationsNo ratings yet
- Elgenfunction Expansions Associated with Second Order Differential EquationsFrom EverandElgenfunction Expansions Associated with Second Order Differential EquationsNo ratings yet
- 13 BDocument1 page13 BSlaven IvanovicNo ratings yet
- 13 CDocument1 page13 CSlaven IvanovicNo ratings yet
- 13 D 1Document1 page13 D 1Slaven IvanovicNo ratings yet
- 11 CDocument1 page11 CSlaven IvanovicNo ratings yet
- 12 ADocument1 page12 ASlaven IvanovicNo ratings yet
- 13 ADocument1 page13 ASlaven IvanovicNo ratings yet
- Agyg 09 LVCBDocument22 pagesAgyg 09 LVCBSlaven IvanovicNo ratings yet
- 12 BDocument1 page12 BSlaven IvanovicNo ratings yet
- Solver in Excel (Easy Tutorial) 4Document1 pageSolver in Excel (Easy Tutorial) 4Slaven IvanovicNo ratings yet
- Freestyle 3 Patient ManualDocument46 pagesFreestyle 3 Patient ManualSlaven IvanovicNo ratings yet
- Developer TabDocument5 pagesDeveloper TabSlaven IvanovicNo ratings yet
- Acute Ischemic Stroke: MR DR Sci Vesna Ivanović Sjekloća DR Darko RadinovicDocument7 pagesAcute Ischemic Stroke: MR DR Sci Vesna Ivanović Sjekloća DR Darko RadinovicSlaven IvanovicNo ratings yet
- ACER 10 Dec 2014 - Standard and Non-Standard Contracts - FinalDocument22 pagesACER 10 Dec 2014 - Standard and Non-Standard Contracts - FinalSlaven IvanovicNo ratings yet
- User'S Manual: PC Usb Digital OscilloscopeDocument87 pagesUser'S Manual: PC Usb Digital OscilloscopeSlaven IvanovicNo ratings yet
- Advantages & Limitations of Different Energy Storage Systems Electricalvoice 2Document1 pageAdvantages & Limitations of Different Energy Storage Systems Electricalvoice 2Slaven IvanovicNo ratings yet
- Universality of The de Broglie-Einstein Velocity Equation: MC E MV PDocument2 pagesUniversality of The de Broglie-Einstein Velocity Equation: MC E MV PSlaven IvanovicNo ratings yet
- Club Swan 50Document19 pagesClub Swan 50Slaven IvanovicNo ratings yet
- Load Profiles v2.0 CgiDocument31 pagesLoad Profiles v2.0 CgiSlaven IvanovicNo ratings yet
- ToR TA ME - 16 - 10Document13 pagesToR TA ME - 16 - 10Slaven IvanovicNo ratings yet
- EFETBooklet Towards ASingle European Energy Market Jan 13 Reduced SizeDocument20 pagesEFETBooklet Towards ASingle European Energy Market Jan 13 Reduced SizeSlaven IvanovicNo ratings yet
- Learning and Working With Generalized Functions Can Be Fun: F. Farassat NASA Langley Research Center Hampton, VirginiaDocument20 pagesLearning and Working With Generalized Functions Can Be Fun: F. Farassat NASA Langley Research Center Hampton, VirginiaSlaven IvanovicNo ratings yet
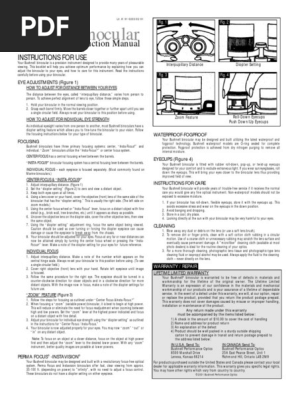
- Bushnell Binocular ManualDocument1 pageBushnell Binocular ManualSlaven IvanovicNo ratings yet
- V V Q ( V) V: 14.1 Der Satz Von Der Erhaltung Der Elektrischen LadungDocument4 pagesV V Q ( V) V: 14.1 Der Satz Von Der Erhaltung Der Elektrischen LadungSlaven IvanovicNo ratings yet
- Euphemia Public Description 1Document45 pagesEuphemia Public Description 1Slaven IvanovicNo ratings yet
- Lecture 15 Plane Strain and Axisymmetric Structural Elements CommentaryDocument2 pagesLecture 15 Plane Strain and Axisymmetric Structural Elements CommentaryHenry AbrahamNo ratings yet
- Ijerph 17 05485 v2Document24 pagesIjerph 17 05485 v2materiale facultateNo ratings yet
- Binchester Roman Fort, County DurhamDocument46 pagesBinchester Roman Fort, County DurhamWessex Archaeology100% (5)
- Food Standards, Certification, and Poverty Among Coffee Farmers in UgandaDocument13 pagesFood Standards, Certification, and Poverty Among Coffee Farmers in UgandaHadi P.No ratings yet
- 9-Plane Table SurveyingDocument34 pages9-Plane Table SurveyingVinayaka RamNo ratings yet
- Quantitative FinalDocument43 pagesQuantitative FinaldagusclemlaurenceNo ratings yet
- Heliyon: Hakim Manurung, Gatot Yudoko, Liane OkdinawatiDocument13 pagesHeliyon: Hakim Manurung, Gatot Yudoko, Liane OkdinawatiepulNo ratings yet
- Editing 2.0Document12 pagesEditing 2.0Karmela EspinosaNo ratings yet
- Analysis of Factors Influencing Consumer Behavior and Purchasing Decision Making at Coffe ShopDocument5 pagesAnalysis of Factors Influencing Consumer Behavior and Purchasing Decision Making at Coffe ShopInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Statistical Tests For Comparative StudiesDocument7 pagesStatistical Tests For Comparative StudiesalohaNo ratings yet
- Nonlinear Frame Finite Elements in OpenSeesDocument40 pagesNonlinear Frame Finite Elements in OpenSeesMostafa NouhNo ratings yet
- Dance CUE Research ProposalDocument7 pagesDance CUE Research ProposalMarissa FinkelsteinNo ratings yet
- Render Qam13e PPT 02Document109 pagesRender Qam13e PPT 02Just RevolutionNo ratings yet
- Interpersonal Relationships and Task PerformanceDocument16 pagesInterpersonal Relationships and Task PerformanceCorbean AlexandruNo ratings yet
- S4 Cambridge IGCSE Revision SheetsDocument6 pagesS4 Cambridge IGCSE Revision SheetsSteven Patrick YuNo ratings yet
- Determination of Precision and Bias of Methods of Committee D22Document5 pagesDetermination of Precision and Bias of Methods of Committee D22camila65No ratings yet
- Bone Void Fillers - JAAOS - Journal of The American Academy of Orthopaedic SurgeonsDocument5 pagesBone Void Fillers - JAAOS - Journal of The American Academy of Orthopaedic SurgeonsmuklisrivaiNo ratings yet
- 420 FinalDocument21 pages420 Finalapi-401247746No ratings yet
- Drawing & Interpretation of Graph PDFDocument9 pagesDrawing & Interpretation of Graph PDFHAFEELNo ratings yet
- Mtech 3 Sem Research Methodology mt302 2018Document2 pagesMtech 3 Sem Research Methodology mt302 2018Anshuman PatriNo ratings yet
- The Pantawid Pamilyang Pilipino Program - Essay Example, 1548 Words GradesFixerDocument5 pagesThe Pantawid Pamilyang Pilipino Program - Essay Example, 1548 Words GradesFixerJoana Marie De TorresNo ratings yet
- How Did The MGM Grand Use Employee Surveys To Enhance Employee EngagementDocument4 pagesHow Did The MGM Grand Use Employee Surveys To Enhance Employee Engagementkarinaprisylla100% (1)
- BRM - Unit 3 - NotesDocument13 pagesBRM - Unit 3 - NotesअभिषेकNo ratings yet
- Project Management Journal - 2014 - Conforto - Can Agile Project Management Be Adopted by Industries Other Than SoftwareDocument14 pagesProject Management Journal - 2014 - Conforto - Can Agile Project Management Be Adopted by Industries Other Than SoftwareFrancesca TataruNo ratings yet
- Application of Delay Analysis in JKR ProjectsDocument113 pagesApplication of Delay Analysis in JKR Projectsbuzt25No ratings yet
- Social Impact in Social Media: A New Method To Evaluate The Social Impact of ResearchDocument20 pagesSocial Impact in Social Media: A New Method To Evaluate The Social Impact of ResearchShreya MuralidharanNo ratings yet
- Language Shapes The Way We Think, and Determines What We Can Think About.Document18 pagesLanguage Shapes The Way We Think, and Determines What We Can Think About.Jessica PadrónNo ratings yet
- Hand Sanitizers: Business Research Report OnDocument34 pagesHand Sanitizers: Business Research Report OnPranav SharmaNo ratings yet