Mehanizam



Mehanizam (engl. mechanism, prema grč. μηχανή: stroj) je mehanička naprava ili njezin dio koji se sastoji od pokretnih dijelova, međusobno tako povezanih da se pokretanjem jednoga uzrokuje gibanje ostalih; služi za prijenos i pretvorbu jedne vrste gibanja u drugu vrstu gibanja. U mehanici, mehanizmi se proučavaju kao sustavi međusobno povezanih pokretnih tijela – članova mehanizama, od kojih je jedan nepomičan, a prijenos gibanja, odnosno silâ ili momenata odvija se s pogonskoga člana na izvršni (radni) član. Članovi su međusobno povezani vezama kojima se ujedno omogućuje određeno relativno gibanje jednoga člana u odnosu na drugi; dva međusobno povezana člana nazivaju se kinematičkim parom. Kinematički parovi razlikuju se već prema vrsti veze, odnosno prema tomu koliko im ona dopušta stupnjeva slobode gibanja (nevezano, to jest slobodno tijelo u prostoru ima ukupno 6 stupnjeva slobode gibanja: tri komponente translacije i tri rotacije). Najmanji broj stupnjeva slobode imaju rotacijski, translacijski i vijčani kinematički parovi (jedan), a najveći ih broj (pet) ima kinematički par što ga čine dva člana u slobodnom dodiru u prostoru. [2]
Mehanizmi se prema namjeni i konstrukcijskim svojstvima dijele na: zglobno-polužne mehanizme, krivuljne mehanizme, mehanizme za prijenos rotacijskoga gibanja i mehanizme sa savitljivim ili tekućim članovima.
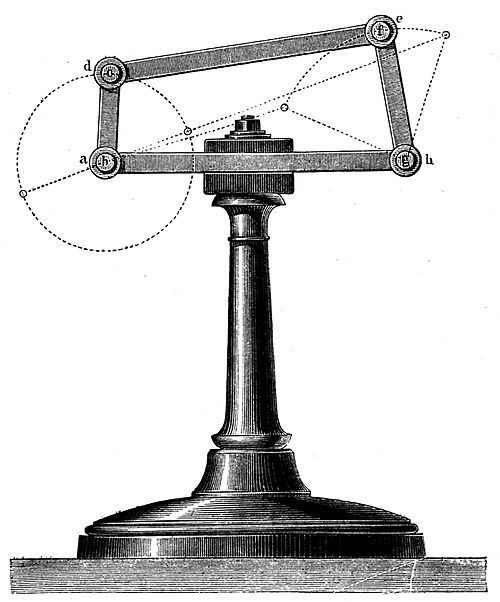
Zglobno-polužni mehanizmi imaju za članove poluge, međusobno povezane zglobovima. Jedan je od najjednostavnijih takvih mehanizama zglobni četverokut, koji se sastoji od četiriju članova međusobno povezanih rotacijskim zglobovima. Promjenom duljina pojedinih članova i zamjenom nepomičnoga člana (inverzijom) mogu se kod toga jednostavnog mehanizma ostvariti različita gibanja pogonskog i radnog člana.
Krivuljni mehanizmi nalaze vrlo široku primjenu kod različitih tehnoloških procesa. Prijenos gibanja ostvaruje se dodirom pogonskog i radnoga člana, a odabirom oblika pogonskoga člana (grebena) mogu se ostvariti gotovo sve vrste gibanja koje se pojavljuju u tehničkoj primjeni.
Mehanizmi za prijenos rotacijskoga gibanja vrlo često imaju za članove zupčanike, remenice, tarenice. Kod običnih zupčaničkih mehanizama zupčanici rotiraju oko nepomičnih osi, dok kod planetarnih mehanizama planetarni zupčanici rotiraju oko osi koja također rotira oko druge osi te tako izvode takozvano epicikličko gibanje. Primjenom planetarnih prijenosnika mogu se ostvariti vrlo veliki prijenosni omjeri uz pomoć malog broja zupčanika. Epiciklički prijenosnici s više stupnjeva prijenosa nazivaju se diferencijalima.
Jednostavni mehanizmi potječu još iz staroga vijeka, kada su izumljene prve poluge, koloturi i zupčanici. Poznati matematičari i fizičari iz 3. stoljeća pr. Kr. konstruirali su i analizirali takve jednostavne naprave, pa je tako, na primjer, Arhimed bio autor prvih rasprava o poluzi i koloturu, a još se i danas primjenjuju njegove konstrukcije koloturnika i vijčane cijevi za crpljenje vode (Arhimedov vijak). Tijekom vremena razvijani su i usavršavani različiti mehanizmi, a njihov je razvoj doživio uzlet početkom industrijalizacije u 19. stoljeća, kada su se počeli i sustavno znanstveno obrađivati u sklopu teorije mehanizama, zasebne discipline mehanike.
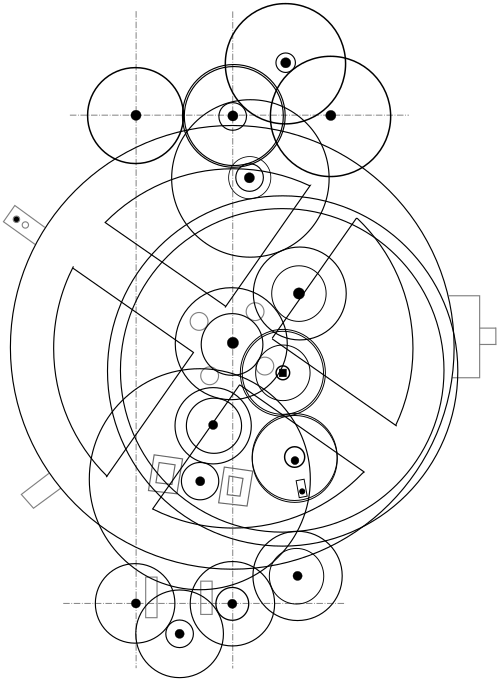
Mehanizam iz Antikitere je složen mehanički uređaj sa zupčanicima i brojčanicima, a služio je za predviđanje položaja planeta, Sunca i Mjeseca. Pretpostavlja se da potječe od 150. do 100. pr. Kr. Smatra se prvim analognim računalom. Pronađen je od 1900. do 1901., iz jedne starorimske brodske olupine pokraj grčkog otoka Antikitere, po čemu je i dobio ime. Dio teksta na stroju ima preko 1000 znakova. Mehanizam iz Antikitere se čuva se u atenskom Nacionalnom arheološkom muzeju. Mehanizam ima više od 30 brončanih prstena i brojčanika, a prekriven je astronomskim zapisima. Njegova jedinstvenost je i dovela do toga da ne može napustiti muzej. Zato je u privatno financiranom projektu tjelesni skener od osam tona morao biti sklopljen na licu mjesta. Skener je pomoću trodimenzionalne tomografije otkrio golom oku nevidljivi tekst. [3]
Teorija mehanizama razvijala se s razvojem industrije, a posebno strojarstva. Zbog toga se o osnovama znanosti o mehanizmima može govoriti tek u 18. stoljeću, kad počinju sustavna istraživanja na području kinematike ravninskog i prostornog gibanja tijela, a posebno na području kinematike prinudnog gibanja. Najvažniji radovi tog doba jesu radovi švicarskih matematičara J. Bernoullija i L. Eulera. Bernoullija je postavio teorem o trenutnom polu ravninskog gibanja sila i prostorno gibanje tijela. U to vrijeme radovi T. Newcomena i J. Watta su omogućili gradnju prvog parnog stroja. Watt je konstruirao i svoj poznati paralelogram (balansir), a ostvaren je i niz drugih mehanizama za tehničku primjenu.
Najviše dostignuća na kojima se temelji znanost o mehanizmima utvrđeno je tokom 19. stoljeća. Teorija mehanizama, pod nazivom Mehanika primjenjena na strojeve, pojavila se i kao poseban nastavni predmet, pa ju je još 1838. poznati francuski matematičar J. Poncelet predavao na Sorboni, a zatim i na Politehničkoj školi u Parizu. Poncelet je autor radova o konstrukciji spregnutih profila koji se dodiruju po evolventnim i cikloidnim krivuljama. Takvim radovima, koji su postali osnova teorije ozubljenja, bavili su se u to vrijeme i ostali prestavnici francuske škole teorije mehanizama. Među njima su: A. Ampère, koji je neko vrijeme predavao mehaniku na Politehničkoj školi u Parizu, F. Savary koji se bavio teorijom zakrivljenosti spregnutih profila i odgovarajućih poloida i putanja i E. Bobillier, koji je pored ostaloga, dao grafičko rješenje za određivanje središta zakrivljenosti spregnutih profila.
Najpoznatija imena njemačke škole 19. stoljeća su: F. Reuleaux, L. Burmester i M. Grübler. Reuleaux je svojim radovima obradio tehničku primjenu kinematike prinudnog gibanja, a bavio se i strukturom mehanizama, posebno analizom kinematičkih parova. Burmester je tvorac geometrijske metode sinteze mehanizama, a razradio je i geometrijske metode za analizu mehanizama. Grübler se bavio strukturom i analizom pokretljivosti mehanizama; njegov kriterij za pokretljivost nekih jednostavnih vrsta mehanizama primjenjuje se i danas.
U 19. stoljeću najznačajniji prestavnik engleske škole bio je R. Willis. Poznato je njegovo djelo Principles of Mechanisms (1841.), a važni su mu radovi o odnosu među kutnim brzinama pojedinih dijelova mehanizma, posebno za planetarne i diferencijalne zupčaste mehanizme. Iz tog doba poznata su još imena T. Younga, H. Moseleya, W. J. M. Rankinea i drugih.
Osnivač ruske škole i tvorac analitičke metode sinteze mehanizama je ruski akademik P. L. Čebišev. Poznati su njegovi radovi na području strukture mehanizama, posebno strukturna jednadžba za određivanje pokretljivosti ravnih mehanizama. Posebno su važni njegovi radovi na analitičkoj sintezi zglobno polužnih mehanizama i njegova numerička metoda najboljeg približenja zadanoj funkciji pomoću takozvanih Čebiševljevih polinoma. Čebiševljeve radove na analitičkoj sintezi mehanizama znatno su proširili Z. Š. Bloh i N. I. Levitskij, a radove na strukturnoj analizi i sintezi P. I. Somov i L. V. Assur. Od novijih ruskih znanstvenika najpoznatije mjesto zauzima I. I. Artobolevski. Njegovi radovi obuhvaćaju sva područja teorije mehanizama.
Nagli razvoj tehnologije u 20. stoljeću, posebno razvoj mehanizacije i automatizacije, omogućio je i potaknuo snažan razvoj teorije mehanizama, tako da je ona postala zasebno znanstveno područje. [4]
- ↑ http://en.wikisource.org/wiki/The_Kinematics_of_Machinery Kinematics of Machinery, 1876.
- ↑ mehanizam, [1], "Hrvatska enciklopedija", Leksikografski zavod Miroslav Krleža, www.enciklopedija.hr, 2015.
- ↑ [2] Arhivirano 2017-08-22 na Wayback Machine-u "Mehanizam iz Antikitere", www.antikviteti.net, 2011.
- ↑ "Tehnička enciklopedija" (Mehanizmi), glavni urednik Hrvoje Požar, Grafički zavod Hrvatske, 1987.