アポロ宇宙船

アポロ宇宙船(アポロうちゅうせん、Apollo spacecraft)は、1960年代末までに人類を月に送り、安全に地球に送り返すというアメリカ合衆国のアポロ計画の目標を達成するために設計された宇宙船であり、3つのパーツから構成される。宇宙船は使い捨て型で、アポロ司令・機械船 (CSM) とアポロ月着陸船 (LM) から構成される。打ち上げ脱出システム (LES) は、打上げ時の緊急事態の時にのみ使われ、さらに宇宙船/月着陸船アダプター (SLA) はCSMとを打上げ機につなぎ、LMを格納するために設計された。
設計は、月軌道ランデブーを基にした。これは、2つのドッキングした宇宙船が月に送られて月軌道に達し、その後LMが分離されて月に着陸し、CSMは軌道上に留まるというものである。月探査が終了すると、2つの宇宙船はランデブーし、月軌道上でドッキングし、CSMが乗組員を地球に送り返すというものである。CSMは、乗組員を乗せて地球に戻る唯一の宇宙船となる。
LESは、打ち上げ後、必要のない高度まで達した時点で投棄され、SLAは打上げ機の上段につながれたままとなる。低周回軌道のアポロ計画で使われた2機の無人CSM、1機の無人LM、1機の有人CSMは、サターンIBによって宇宙に運ばれた。高周回軌道の試験飛行のための2機の無人CSM、月探査のための1機の有人CSM、1度の有人周回低軌道探査、8度の有人月探査のための完全な宇宙船が、より大きなサターンVによって宇宙に運ばれた。アポロ計画後は、3度のスカイラブ計画とアポロ・ソユーズテスト計画のために4機のCSMがサターンIBで打ち上げられた。
アポロ司令・機械船
[編集]アポロ宇宙船の最も主要な部分は、地球周回、月への飛行、月周回、地球への帰還のために設計された3人乗りの機体である。ロックウェル・インターナショナルによって製造されたコマンドモジュールとサービスモジュールから構成される。
コマンドモジュール (CM)
[編集]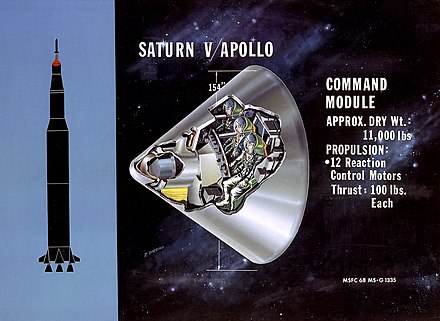
コマンドモジュールは、アポロ宇宙船を操縦し、3人の乗組員の居住スペースとなる構造である。与圧されたメインキャビン、乗組員用のカウチ、操作パネル、誘導システム、通信システム、環境制御システム、バッテリー、熱シールド、姿勢制御システム、前部のドッキング用ハッチ、側部のハッチ、5つの窓、パラシュート回収システム等を備えている。地球に帰ってくる唯一の構造部である。
サービスモジュール (SM)
[編集]
サービスモジュールは与圧されておらず、エンジン、月軌道から離脱するための推進システム、高度を保つための姿勢制御システム、水素と酸素の燃料電池、排熱を外に逃がすためのラジエーター、高利得アンテナ等を備えている。酸素は呼吸用にも用いられ、燃料電池は、飲用のための水も生み出す。アポロ15号、アポロ16号、アポロ17号では、月を調査するためのマップ用カメラや小さな人工衛星と一緒に科学実験機器も積まれた。
サービスモジュールの大部分は、推進システムとエンジンで占められている。このエンジンは何度も再起動でき、月軌道への侵入、離脱や地球から月の間の方向制御等に用いられた。
サービスモジュールは、ミッションの間中ずっとコマンドモジュールと結合しており、地球の大気圏再突入の直前に投棄される。
アポロ月着陸船 (LM)
[編集]
アポロ月着陸船は、月面に着陸し、月軌道に戻ることを目的に設計された構造であり、宇宙の真空の中を単独で飛行するという意味で、初めての真の「宇宙船」である。下降段と上昇段から構成されている。2人の宇宙飛行士が最大で4日間から5日間生活することができ、アポロ15号、16号、17号のミッションで用いられた。グラマンによって設計、製造された。
下降段は、月に着陸するための着陸用ギア、着陸用レーダーアンテナ、下降推進エンジン、燃料等を備えていた。その他、実験器具や月面車、テレビカメラ、月サンプルの収集器具等も運んだ。
上昇段は、月軌道に戻り、アポロ司令・機械船とランデブーするための、乗組員用のキャビン、パネル、ドッキングポート、ハッチ、誘導システム、姿勢制御システム、通信アンテナ、上昇推進エンジン、燃料等を備えていた。
打ち上げ脱出システム (LES)
[編集]

アポロ宇宙船の打ち上げ脱出システムは、ロッキードによって製造され、その目的は、打上げ失敗の際に、乗組員の乗ったコマンドモジュールを打上げロケットから離脱させることであった。打上げ失敗としては、打上げ施設の火災、ロケットの爆発、予定進路からの離脱等が考えられた。
打ち上げ脱出システムは、固体燃料の脱出用ロケットを自動で点火し、カナードを開いてコマンドモジュールを遠くに打ち出す。打ち上げ脱出システムはその後投棄され、コマンドモジュールはパラシュートで着陸する。打上げ施設で火災があった場合は、打ち上げ脱出システムはコマンドモジュールをパラシュートが展開するのに十分な高さまで上昇させる。
緊急事態が起きなかった場合、打上げロケットの第2段に点火されて20秒から30秒後に打ち上げ脱出システムは投棄される。投棄用のモーターは、ATKランチ・システムズ・グループ製の固体燃料ロケットである。
仕様
[編集]- BPC(ブースター保護カバー)からの長さ: 9.92 m
- BPCを含めた長さ: 12.02 m
- 直径: 0.66 m
- 合計質量: 4,200 kg
- 高度3万6,000フィートでの推力: 650 kN
- 最大推力: 890 kN
- 燃焼時間: 4.0秒
緊急脱出試験
[編集]宇宙船/月着陸船アダプター (SLA)
[編集]
宇宙船/月着陸船アダプターは、サターンIVBロケットでサービスモジュールを支えるための、ロックウェル・インターナショナルが製造した円錐形のアルミニウム製の構造物である。これは、打上げと大気圏からの上昇時に、月着陸船のエンジンノズルと打上げ機をサービスモジュールのケーブルから守る役割を果たす。
SLAは、S-IVBの頂上の機器ユニットに固定された高さ2.1mの4つのパネルから構成され、これらは蝶番を通して、花びらのように開いた高さ6.4mの4つのパネルに繋がっている。
SLAは、厚さ43mmのアルミニウムのハニカム構造の素材で作られている[1]。SLAの外装は、0.76から5.1mmのコルクの薄層で覆われ、打上げと上昇の時の熱ストレスを緩和するために、白色に塗装されている[2]。サービスモジュールは、長い方のパネルの上部にフランジで留められ、ケーブルから給電される。
宇宙に出ると、宇宙飛行士はコントロールパネルの'CSM/LV Sep'のボタンを押し、コマンドモジュールとサービスモジュールを打上げ機から切り離す。すると、サービスモジュールとSLAの間のフランジの導火線に着火され、4つのSLAパネルのジョイントに沿ってサービスモジュールを離し、パネルとの間の接続部を吹き飛ばす。その後、SLAパネルの下端の2重のスラスタが点火し、蝶番の周りを1秒間に30°から60°の速さで回転させる。


アポロ7号までの全ての飛行では、SLAパネルはS-IVBに結合したままで、当初の設計よりも45°開いていた。しかし、S-IVB/SLAとダミーのターゲットとのランデブーの訓練を行っていたアポロ7号の乗組員がドッキングや月着陸船の放出の際の宇宙船とSLAパネルの衝突の可能性に気づき、ばね付の蝶番が、時速約5マイルの速さでS-IVBからシステムを押し出すように設計が変更された。
月着陸船は、下部パネルの4か所でSLAと接続されており、宇宙飛行士がCSMからLMに移るとその接続を切り離し、LMと機器ユニットの間のケーブルも切断される。
仕様
[編集]- 高さ: 8.5 m
- 頂部直径: 3.9 m
- 基部直径: 6.6 m
- 重さ: 1,840 kg
- 体積: 190 m3
脚注
[編集]- ^ 19730010176.pdf:NASA TECHNICAL NOTE D-7085
- ^ Moonport, Ch20-3:Two Engines Out but Still Running
参考文献
[編集]- North American Rockwell, 'Apollo Command Module News Reference', 1968.
- NASA TN D-7083: Launch Escape Propulsion Subsystem
- Apollo Operations Handbook Lunar Module Subsystems Data
外部リンク
[編集]- NASA report JSC-03600 Apollo/Skylab ASTP and Shuttle Orbiter Major End Items, Final Report, March 1978; NASA report listing dispositions of all rockets and spacecraft used in the Apollo, Skylab, Apollo-Soyez Test Project and early shuttle missions, as of 1978.