Muutkond
| See artikkel räägib geomeetria ja topoloogia mõistest; algebra mõiste kohta vaata artiklit Muutkond (algebra), keeleteaduse mõiste kohta vaata artiklit Muutkond (keeleteadus). |


Muutkonna mõistet geomeetrias võib intuitiivselt mõista üldistusena klassifikatsioonist, mille järgi joon on ühemõõtmeline muutkond ja pind on kahemõõtmeline muutkond. n-mõõtmeline muutkond on ruum, mis on lokaalselt eukleidiline. Teiste sõnadega, muutkonna iga punkt kuulub mingisse piirkonda, mis näeb välja nagu eukleidiline ruum[1].

Muutkondi saab modelleerida kahte moodi:
- Kleepides lihtsaid ruume kokku, nagu lapsed panevad kokku tetraeedreid, kuupe ja teisi hulktahukaid, joonistades paberile pinnalaotuse ning seejärel voltides ja liimides, või nagu rõivad õmmeldakse kangatükkidest kokku. Näiteks ringjoon saadakse sirglõiku tema endaga kokku voltides, silinder või koonus saadakse tasandilist riba tema endaga kokku voltides. Teine klassikaline näide on joonisel näha olev Möbiuse leht (rangelt võttes on see rajaga muutkond). Samuti on võimalik lisada kerapinnale sangasid.
- Pannes neile peale võrestiku, mille meetrika sõltub asukohast, näiteks sfäärilised koordinaadid (nagu geograafilised koordinaadid, mille puhul pikkuskraadide vahe sõltub laiuskraadist, olles suurem ekvaatorile lähemal). Sellisel juhul on tegu Riemanni muutkonnaga.
Kõige lihtsamate muutkondade seas on tasand ja eukleidiline ruum (neid on võimalik saada kokkukleepimise teel) ning jooned ja pinnad nendel. Tavaliselt defineeritakse neid küll võrranditega, kuid kõiki pindu on, nagu hulktahukaidki, saada pinnalaotustest kokkukleepimise juhiste järgi. See ongi muutkondade defineerimise üldine viis.
Raske on öelda, kes esimesena kõveraid või pindu uuris. Carl Friedrich Gaussil oli abstraktne pinna mõiste, aga n-mõõtmelise muutkonna üldine mõiste pärineb Bernhard Riemannilt. Muutkondi rakendatakse paljude matemaatika ja füüsika probleemide lahendamisel, sest nad pakuvad rohkem võimalusi kui vektorruumid. Viimaseid nimetatakse mõnikord lamedadeks ruumideks või eukleidilisteks ruumideks, et eristada neid muutkondadest kui üldjuhul kõveratest ruumidest.
Algebraline topoloogia püüab muutkondi (ja ka üldisemaid objekte) klassifitseerida, omistades igale muutkonnale invariante (mis võivad olla arvud või muud matemaatilised objektid), mis iseloomustab tema topoloogilisi omadusi.
Laialdaselt uuritakse täiendavate struktuuridega muutkondi, rakendades diferentsiaaltopoloogiat, diferentsiaalgeomeetriat, Riemanni geomeetriat ja sümplektilist geomeetriat.
Muutkondadele pööravad tähelepanu ka füüsikud. Need on osutunud heaks vahendiks Albert Einsteini üldrelatiivsusteooria formaliseerimisel ning neid rakendatakse ka stringiteoorias. Ka klassikalises mehaanikas ei saada enam ilma nendeta läbi.
Sissejuhatus
[muuda | muuda lähteteksti]Heaks näiteks muutkondade mõistmisel on raskused, mis tekivad Maa pinna kujutamisel tasandil. Sellepärast ongi muutkondadega seotud terminoloogiasse laenatud kartograafia valdkonna sõnu.
Kaardid
[muuda | muuda lähteteksti]Maapinnal orienteerumiseks kasutatakse kaarte, millest on kokku pandud atlased. Kaardi äärel on järgmise kaardiga mõtteliseks kokkukleepimiseks vajalik info. Selliseks kokkukleepimiseks on tarvis teatud liiasust: näiteks võib Moskva figureerida nii Euroopa kui ka Aasia kaardil. Samamoodi saab muutkonna kirjeldamiseks kasutada matemaatilist kaardi ja atlase mõistet: kaardid on kogutud atlasesse, näidates, kuidas ühelt kaardilt teisele üle minna (kaarti vahetada). Gloobus annab tüüpilise muutkonna näite, sest teda saab kujutada kartograafiliste kaartide kogumi abil.

Kaart on muutkonna osa, mis on analoogne vektorruumi osaga; kaartide vahetused näitavad, kuidas need muutkondade osad omavahel koos käivad. Nii võib ringjoone kirjeldamisel võtta kaartideks kaared, mis osalt kattuvad; kaartide vahetus annab teada, kuidas toimub kattumise piirkonnas kokkukleepimine.
Muutkonda ei ole üldjuhul võimalik kirjeldada üheainsa kaardi abil, sest muutkonna globaalne ehitus erineb eeskujuks oleva ruumi ehitusest. Näiteks ei saa ükski "lame" kaart kogu Maad adekvaatselt kirjeldada.
Muutkonnad on topoloogilised ruumid ja nende topoloogia on üheselt määratud vastavate atlastega.
Olenevalt kaartide vahetuse rakendustest on muutkonnal tugevam või nõrgem struktuur, näiteks topoloogiline muutkond, diferentseeruv muutkond, sümplektiline muutkond, lokaalselt lame muutkond. Topoloogilise muutkonna puhul tähendab atlase defineerimine lihtsalt niisuguse topoloogia defineerimist, milles piisavalt väikesed lahtised hulgad langevad kokku. Mainitud peenemate struktuuride puhul ei ole defineerimine ilma kaartide kasutamiseta võimalik.
Mõõde ja topoloogia
[muuda | muuda lähteteksti]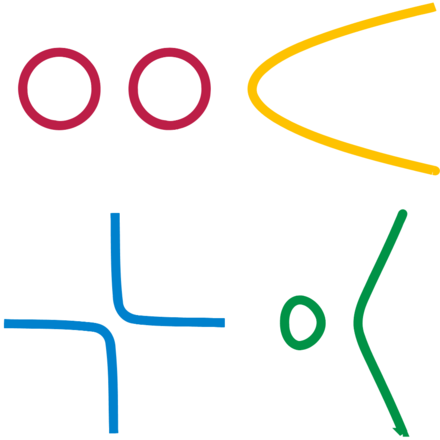
Esimene muutkonnaga seotud mõiste on tema mõõde. See näitab, mitu sõltumatut parameetrit tuleb fikseerida, et muutkonna punkt lokaalselt positsioneerida.
- Jooned on ühemõõtmelised muutkonnad, sest asukoha iseloomustamiseks piisab näiteks jooneabstsissist.
- Pinnal on tarvis kaht koordinaati: nii tuleb punkti asukohta kerapinnal iseloomustada laiuse ja pikkusega nagu linna asukoha iseloomustamiseks gloobusel.
- On palju 2-st suurema mõõtmega muutkondi, mida on raske graafiliselt kujutada. Neid ei saa esitada meie tavalises ruumis, mille mõõde on 3 (laius, pikkus, sügavus).
Kõigil muutkondadel ühe ja sama mõõtmega n ehk n-muutkondadel on ühesugune lokaalne topoloogia. Definitsiooni kohaselt sarnaneb niisuguse muutkonna väike osa alati n-mõõtmelise vektorruumiga üle reaalarvude korpuse. Nii on joone väike osa sirge kõver analoog, pinna väike osa tasandi kõver analoog jne.
Muutkonnad erinevad üksteisest globaalsete omaduste poolest. Näiteks koosneb joonisel punane muutkond kahest tõkestatud tükist (kahest ringjoonest) ning on ilmselt võimatu seda pidevalt deformeerides saada mõnd kolmest ülejäänud joonest.
Teine näide: kerapind ja toori pind ei ole topoloogiliselt sarnased. Iga ringjoon kerapinnal lahutab kerapinna vähemalt kaheks ühisosata tükiks; toori pinnal on aga palju ringjooni, mis ei lahuta teda kaheks ühisosata tükiks. Üldisemalt võivad topoloogiat keerulisemaks teha augud, sangad jne.
Abstraktne muutkond ja alammuutkond
[muuda | muuda lähteteksti]
Paljud tasandi või kolmemõõtmelise ruumi alamhulgad saab loomulikul moel varustada muutkonna struktuuriga: ringjoon, silinder, kerapind, Möbiuse leht jne. Neid nimetatakse alammuutkondadeks ehk sisestatud muutkondadeks. Peale selle räägitakse abstraktsetest muutkondadest, mis konstrueeritakse ilma, et neid vaadeldaks alammuutkondadena. Kõige lihtsam näide on n-mõõtmeline projektiivne ruum: see on lihtsalt kõigi selliste sirgete hulk, mis läbivad koordinaatide alguspunkti vektorruumis mõõtmega n + 1. Teine näide on Kleini pudel, mis on joonisel kujutatud ebatäielikul kujul. Näitlikustamiseks tuleb ette kujutada, et klaassepp võtab tavalise pudeli, teeb põhja sisse augu, pikendab pudeli kaela, teeb selle kõveraks, ajab selle maagiliselt pudeli külje seest läbi ning ühendab augu kohast põhjaga. Kleini pudelit saab kirjeldada kaartide ja koordinaatide süsteemi abil, mida siin on kujutatud meridiaanide ja paralleelide võrgustikuna (tegu on kahemõõtmelise muutkonnaga).
Whitney sisestamisteoreem näitab, et iga n-mõõtmelist abstraktset muutkonda saab esitada piisavalt suure mõõtmega (nimelt 2n) muutkonna alammuutkonnana. Nii näiteks ei saa (2-mõõtmelist) Kleini pudelit sisestada 3-mõõtmelisse ruumi, küll aga moodustab ta 4-mõõtmelise ruumi alammuutkonna.
Abstraktsed muutkonnad võivad algul tunduda ülearustena, kuid "ümbritseva ruumiga" mittearvestamisel on oma eelised. Näiteks ei nõua paljud uute muutkondade konstrueerimise viisid (näiteks faktormuutkondade moodustamine ja muutkondade kokkukleepimine) ümbritseva ruumiga arvestamist. Kuigi teoreetiliselt on konstrueeritud muutkondi võimalik esitada mõne vektorruumi alammuutkondadena, ei ole praktikas otstarbekas seda teha ja see ei pakuks mingit huvi.
Ajalugu
[muuda | muuda lähteteksti]Siin on visandatud muutkonna mõiste tekkelugu. Selle mõiste rakendamise ajaloost matemaatika eri harudes (näiteks Riemanni geomeetria, sümplektiline geomeetria) on üksikasjalisemalt juttu nendele harudele pühendatud artiklites.
Sisegeomeetria esimesed tulemused
[muuda | muuda lähteteksti]Raske on öelda, millal geomeetrid hakkasid sisegeomeetria vastu spetsiaalset huvi tundma. Vana-Kreekas püstitati ülesandeid, mis puudutasid mõne tasandil või ruumis defineeritud ja paigutatud punktihulga omadusi. Seega oli küsimuseasetus eksplitsiitselt välisgeomeetriline.
Traditsiooniliselt omistatakse Leonhard Eulerile ühe kumerate hulktahukate omaduse avastamine[2]. Tähistame kumera hulktahuka tippude, servade ja tahkude arvu vastavalt P, V ja K; Euleri teoreem hulknurkadest (Euleri valem) ütleb, et P – V + K = 2. See tulemus on seda üllatavam, et pole tarvis arvestada ei pikkuste ega pindaladega. See valem kehtib ka kerapinna triangulatsiooni puhul. See on pinna Euleri karakteristiku arvutamise esimene näide.
Aastal 1813 leidis Simon Antoine Jean L'Huilier, et mittekumera hulktahuka puhul (millel on näiteks augud, nagu näiteks tooril on üks auk) kehtib modifitseeritud Euleri valem P – V + K= 2 – 2g, kus g on aukude arv.[3]. See oli esimene kord, kui arvutati topoloogiline invariant, mis võimaldab ruumi pindu klassifitseerida. Vaateviis jääb siiski välisgeomeetriliseks, sest auke vaadatakse väljastpoolt. Kuidas saab rehvis kõndiv sipelgas kujutleda auku?
Carl Friedrich Gauss tõestas "märkimisväärse tulemuse" (theorema egregium): ruumi pinna Gaussi kõverus ei sõltu viisist, kuidas pind on ümbritsevasse ruumi sisestatud.[4].
Gaussi-Bonnet' valem, mille formuleeris Gauss ja mille tõestas 1848 Pierre-Ossian Bonnet, väljendas Euleri karakteristiku kõveruse kaudu; see näitab, et geomeetrilised ja topoloogilised kaalutlused käivad käsikäes.
Veidrate omadustega uued ruumid
[muuda | muuda lähteteksti]Mitteeukleidiline geomeetria sündis võimatusest tõestada paralleelide aksioomi ehk Eukleidese viiendat postulaati. Selle esimene jälg leidub Giovanni Gerolamo Saccheri vastuväitelise tõestuse katses 1733[5]. Carl Friedrich Gauss oli esimene, kes taipas, et võivad eksisteerida Eukleidese geomeetriale alternatiivsed geomeetriad.[6]. Sellised geomeetriad arendasid välja Nikolaï Lobatševski ja János Bolyai.
Möbiuse lehe konstrueerisid 1858 peaaegu üheaegselt August Ferdinand Möbius ja Johann Benedict Listing. See on ruumi pind, mida on kerge esitada pabeririba abil ning millel on ainult üks tahk ja üks serv. See on esimene mitteorienteeritava pinna näide.
Riemanni muutujad
[muuda | muuda lähteteksti]
Bernhard Riemann laiendas esimesena süstemaatiliselt pinna mõistet suurema mõõtmega objektidele. Ta andis pinna üldistusele nimeks Mannigfaltigkeit[7][8][9]
Artikli kirjutamine on selles kohas pooleli jäänud. Jätkamine on kõigile lahkesti lubatud. |
Viited
[muuda | muuda lähteteksti]- ↑ MacTutor History of Mathematics archive
- ↑ Avastajaks võiks aga pidada René Descartesi, vaata artiklit Euleri teoreem hulktahukatest
- ↑ M. Lhuilier. Mémoire sur la polyédrométrie.... – Annales de Gergonne, kd 3, 1812–1813, lk 169–189.
- ↑ C. F. Gauss. Disquisitiones generales circa superficies curvas, 1827
- ↑ Giovanni Gerolamo Saccheri. Euclides ab omni naevo vindicatus, 1733
- ↑ Edmund F. Robertson. Johann Carl Friedrich Gauss
- ↑ B. Riemann. Grundlagen für eine allgemeine Theorie der Functionen einer veränderlichen complexen Grösse, doktoritöö 1851.
- ↑ B. Riemann. Über die Hypothesen, welche der Geometrie zu Grunde liegen, habilitatsioonitöö 1854
- ↑ Saksa sõna Mannifaltigkeit ('muutkond') oli eeskujuks inglise terminile manifold, manyfold.