Resistencia (fluidos)
En dinámica de fluidos, la resistencia o fricción de fluido, incorrectamente denominada en ocasiones como arrastre[cita requerida], es la fricción entre un objeto sólido y el fluido (un líquido o gas) por el que se mueve.
En el caso particular de que el fluido sea líquido (por ejemplo, el agua), se denomina resistencia hidrodinámica, mientras que en el caso de que el fluido sea gaseoso (por ejemplo, el aire atmosférico), se denomina resistencia aerodinámica.
Para un sólido que se mueve por un fluido, la resistencia es la suma de todas las fuerzas aerodinámicas o hidrodinámicas en la dirección del flujo del fluido externo. Por lo tanto, actúa opuestamente al movimiento del objeto, y en un vehículo motorizado esto se resuelve con el empuje.
Generalmente al estudiar el movimiento bi o tridimensional de un objeto, casi siempre se ignora la resistencia del aire. En muchos problemas esta es una excelente aproximación; en otros, la resistencia del aire es importante, y se necesita saber cómo cuantificarla. Si bien se habla generalmente de resistencia "del aire", porque el aire es el medio a través del cual se mueven los cuerpos, se pueden aplicar las mismas consideraciones para otros gases e incluso líquidos.
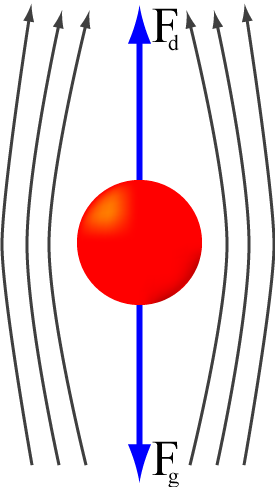
Sin embargo en el presente artículo se asume que la fuerza de resistencia f y la velocidad v tienen la misma dirección pero sentidos opuestos. Esto es, se consideran solamente objetos en los que la fuerza lateral es cero o despreciable. La situación es ilustrada en la figura adjunta.
En la astrodinámica, dependiendo de la situación, la resistencia atmosférica se puede considerar como una ineficiencia que requiere energía adicional durante el lanzamiento de un objeto al espacio o como una ventaja que simplifica el regreso desde la órbita.
En la física del deporte, tiene muchas aplicaciones como por ejemplo, explicar el alto rendimiento del corredor Usain Bolt.[1]
Ejemplos
[editar]Los ejemplos de resistencia de fluidos incluyen al componente de la fuerza aerodinámica o hidrodinámica neta que actúa en dirección opuesta a la dirección de movimiento de un objeto sólido, como automóviles, aviones y cascos de barcos; o actuando en la misma dirección geográfica de movimiento que el sólido, como para las velas unidas a un barco de vela de viento abajo, o en direcciones intermedias en una vela, dependiendo de los puntos de la vela. En el caso de la resistencia viscosa de un fluido en una tubería, la fuerza de resistencia sobre la tubería inmóvil disminuye la velocidad del fluido en relación con la tubería.
En la física de los deportes, la fuerza de resistencia es necesaria para explicar el movimiento de pelotas, jabalinas, flechas y frisbees y el rendimiento de corredores y nadadores.
De igual manera se puede encontrar esta fuerza de resistencia dentro de la Fórmula 1, en donde los monoplazas necesitan una gran carga aerodinámica para mantenerse pegados al suelo.
Tipos
[editar]| Forma y flujo | Resistencia por la forma |
Fricción superficial |
|---|---|---|
| ≈0% | ≈100% | |
| ≈10% | ≈90% | |

|
≈90% | ≈10% |

|
≈100% | ≈0% |
Los tipos de resistencia se dividen generalmente en las siguientes categorías:
- Resistencia parásita o resistencia de presión debido al tamaño y la forma de un cuerpo
- Resistencia por fricción de superficie o resistencia viscosa, debida a la fricción entre el fluido y una superficie que puede ser el exterior de un objeto o el interior, como el orificio de una tubería
El efecto de la aerodinámica en las proporciones relativas de la fricción de la piel y la resistencia de forma se muestra para dos secciones de cuerpo diferentes, un perfil aerodinámico, que es un cuerpo aerodinámico, y un cilindro, con mayor coeficiente de resistencia. También se muestra una placa plana que ilustra el efecto que tiene la orientación en las proporciones relativas de la fricción de la superficie y la diferencia de presión entre la parte delantera y la trasera. Un cuerpo se conoce como romo (bluff en inglés) si la fuente de resistencia está dominada por las fuerzas de presión y aerodinámico si la resistencia está dominada por las fuerzas viscosas. Los vehículos de carretera son carrocerías romas.[2] En el caso de las aeronaves, la resistencia a la presión y a la fricción se incluyen en la definición de resistencia parásita. La resistencia parásita se expresa a menudo en términos hipotéticos (en la medida en que no hay resistencia por derrame de bordes[3]) "área de resistencia parásita equivalente" que es el área de una placa plana perpendicular al flujo con resistencia equivalente. Se utiliza para comparar la resistencia aerodinámica de diferentes aviones. Por ejemplo, el Douglas DC-3 tiene un área parásita equivalente de 23,7 pies cuadrados y el McDonnell Douglas DC-9, con 30 años de avance en el diseño de aeronaves, un área de 20,6 pies cuadrados aunque llevaba cinco veces más pasajeros.[4]
- La resistencia inducida por la sustentación aparece con las alas o un fuselaje sustentador en la aviación y con los cascos semiplanos o de planeo para las embarcaciones
- La resistencia ondulatoria (aerodinámica) es causada por la presencia de ondas de choque y aparece por primera vez a velocidades subsónicas de las aeronaves cuando las velocidades del flujo local se vuelven supersónicas. La resistencia a las ondas del avión supersónico Concorde prototipo se redujo a velocidad Mach 2 en un 1,8% aplicando la regla del área, alargando el fuselaje trasero 3,73 m en las unidades producidas en serie.[5].
- La resistencia a la formación de olas (hidrodinámica de barcos) o resistencia del oleaje se produce cuando un objeto sólido se mueve a lo largo de un límite de fluido y genera oleaje
- La resistencia aerodinámica en un avión está causada por el ángulo con el que el fuselaje trasero, o la góndola del motor, se estrecha hasta el diámetro del escape del motor.[6]
-
Concorde con cola de resistencia de onda 'alta'
-
Concorde con cola de resistencia de onda 'baja'
-
Avión Hawk que muestra el área circular de base sobre el escape del motor



Ecuación de resistencia
[editar]
La resistencia depende de las propiedades del fluido y del tamaño, la forma y la velocidad del objeto. Una forma de expresarlo es mediante la ecuación de resistencia :
- donde
- es la fuerza de resistencia,
- es la densidad del fluido,[7]
- es la velocidad del objeto con respecto al fluido,
- es el área transversal, y
- es el coeficiente de resistencia - un número adimensional.
El coeficiente de resistencia depende de la forma del objeto y del número de Reynolds
- ,
- donde
- es alguna longitud característica o dimensión lineal. En realidad es el diámetro equivalente del objeto. Para una esfera es el D de la propia esfera.
- Para una sección transversal de forma rectangular a la dirección del movimiento, , donde a y b son las longitudes de los lados del rectángulo.
- es la viscosidad cinemática del fluido (igual a la viscosidad dinámica dividida por la densidad ).
A bajos , es asintóticamente proporcional a , lo que significa que la resistencia es linealmente proporcional a la velocidad, es decir, la fuerza de resistencia sobre una pequeña esfera que se mueve a través de un fluido viscoso viene dada por la Ley de Stokes:
A altos , es más o menos constante y la resistencia aerodinámica variará como el cuadrado de la velocidad. El gráfico de la derecha muestra cómo varía con para el caso de una esfera. Dado que la potencia necesaria para vencer la fuerza de resistencia es el producto de la fuerza por la velocidad, la potencia necesaria para vencer la resistencia variará como el cuadrado de la velocidad en números de Reynolds bajos y como el cubo de la velocidad en números altos.
Puede demostrarse que la fuerza de resistencia puede expresarse en función de un número adimensional, que es dimensionalmente idéntico al número de Bejan.[8] En consecuencia, la fuerza de resistencia y el coeficiente de resistencia pueden ser una función del número de Bejan. De hecho, a partir de la expresión de la fuerza de resistencia se ha obtenido
y en consecuencia permite expresar el coeficiente de resistencia en función del número de Bejan y de la relación entre el área húmeda y el área frontal :[8]
donde es el número de Reynolds relacionado con la longitud de la trayectoria del fluido L.
A alta velocidad
[editar]Como se ha mencionado, la ecuación de resistencia con un coeficiente de resistencia constante da la fuerza experimentada por un objeto que se mueve a través de un fluido a una velocidad relativamente grande (es decir, un número de Reynolds alto, , Re > ~1000). Esto también se llama resistencia cuadrática. La ecuación se atribuye a Lord Rayleigh, que originalmente utilizó "L" 2 en lugar de "A" ("L" es alguna longitud).
Potencia
[editar]Bajo la suposición de que el fluido no se mueve con respecto al sistema de referencia utilizado actualmente, la potencia necesaria para vencer la resistencia aerodinámica viene dada por:
Hay que tener en cuenta que la potencia necesaria para empujar un objeto a través de un fluido aumenta como el cubo de la velocidad. Un coche que circula por una autopista a 50 mph (80,5 km/h) puede necesitar sólo 10 caballos (7,5 kW) para superar la resistencia aerodinámica, pero ese mismo coche a 100 mph (160,9 km/h) requiere 80 HP (59,7 kW).[9]
Al duplicar la velocidad, la resistencia (fuerza) se cuadruplica según la fórmula. Ejercer 4 veces la fuerza sobre una distancia fija produce 4 veces más trabajo. Con el doble de velocidad, el trabajo (resultante del desplazamiento sobre una distancia fija) se realiza dos veces más rápido. Como la potencia es el ritmo de realización del trabajo, 4 veces el trabajo realizado en la mitad de tiempo requiere 8 veces la potencia.
Cuando el fluido se desplaza con respecto al sistema de referencia (por ejemplo, un coche que circula con el viento en contra), la potencia necesaria para superar la resistencia aerodinámica viene dada por:
Donde es la velocidad del viento y es la velocidad del objeto (ambas relativas al suelo).
Velocidad de caída de un objeto
[editar]La velocidad en función del tiempo para un objeto que cae a través de un medio no denso, y que se suelta a velocidad relativa cero v = 0 en el momento t = 0, viene dada aproximadamente por una función que implica una tangente hiperbólica (tanh):
La tangente hiperbólica tiene un valor de límite de uno, para un tiempo grande t. En otras palabras, La velocidad asintótica se aproxima a un valor máximo llamado velocidad terminal vt:
Para un objeto que cae y se suelta con una velocidad relativa v = vien el momento t = 0, with vi < vt, también se define en términos de la función tangente hiperbólica:
Para vi > vt, la función de velocidad se define en términos de la función cotangente hiperbólica:
La cotangente hiperbólica tiene también un límite valor de uno para un tiempo t grande. La velocidad asintótica tiende a la velocidad terminal vt, estrictamente desde arriba vt.
Para vi = vt, la velocidad es constante:
En realidad, estas funciones están definidas por la solución de la siguiente ecuación diferencial:
O, más genéricamente (donde F(v) son las fuerzas que actúan sobre el objeto más allá de la resistencia ):
Para un objeto con forma esférica de diámetro medio d y de densidad ρobj, la velocidad terminal es de aproximadamente
Para los objetos de densidad similar a la del agua (gotas de lluvia, granizo, objetos vivos -mamíferos, pájaros, insectos, etc.) que caen en el aire cerca de la superficie de la Tierra a nivel del mar, la velocidad terminal es aproximadamente igual a:
con d en metros y vt en m/s. Por ejemplo, para un cuerpo humano ( ≈0,6 m) ≈70 m/s, para un animal pequeño como un gato ( ≈0. 2 m) ≈40 m/s, para un pájaro pequeño ( ≈0. 05 m) ≈20 m/s, para un insecto ( ≈0,01 m) ≈9 m/s, y así sucesivamente. La velocidad terminal para objetos muy pequeños (polen, etc.) a bajos números de Reynolds está determinada por la ley de Stokes.
La velocidad terminal es mayor para las criaturas más grandes y, por tanto, potencialmente más mortíferas. Una criatura como un ratón que cae a su velocidad terminal tiene muchas más probabilidades de sobrevivir al impacto con el suelo que un humano que cae a su velocidad terminal. Un animal pequeño como un grillo que impacte a su velocidad terminal probablemente no sufrirá daños. Esto, combinado con la proporción relativa del área de la sección transversal de las extremidades frente a la masa corporal (comúnmente conocida como la Ley cuadrático-cúbica), explica por qué animales muy pequeños pueden caer desde una gran altura y no sufrir daños.[10]
Números de Reynolds muy bajos: La resistencia de Stokes
[editar]
La ecuación de la resistencia viscosa o resistencia lineal es apropiada para objetos o partículas que se mueven a través de un fluido a velocidades relativamente lentas donde no hay turbulencia (es decir, bajo número de Reynolds, ).[11] Obsérvese que el flujo puramente laminar sólo existe hasta Re = 0,1 según esta definición. En este caso, la fuerza de resistencia es aproximadamente proporcional a la velocidad. La ecuación de la resistencia viscosa es:[12]
donde:
- es una constante que depende tanto de las propiedades materiales del objeto y del fluido, como de la geometría del objeto; y
- es la velocidad del objeto.
Cuando un objeto cae desde el reposo, su velocidad será
donde:
- es la densidad del objeto,
- es la densidad del fluido,
- es el volumen del objeto,
- es la aceleración debida a la gravedad (es decir, 9,8 m/s), y
- es la masa del objeto.
La velocidad se aproxima asintóticamente a la velocidad terminal . Para un determinado , los objetos más densos caen más rápidamente.
Para el caso especial de pequeños objetos esféricos que se mueven lentamente a través de un viscoso fluido (y por tanto con un número de Reynolds pequeño), George Gabriel Stokes derivó una expresión para la constante de resistencia :
donde:
- es el radio de Stokes de la partícula, y es la viscosidad del fluido.
La expresión resultante para el resistencia se conoce como resistencia de Stokes:[13]
Por ejemplo, consideremos una pequeña esfera de radio = 0,5 micrómetros (diámetro = 1,0 µm) que se mueve por el agua a una velocidad of 10 µm/s. Utilizando 10-3 Pa-s como la viscosidad dinámica del agua en unidades SI, encontramos una fuerza de resistencia de 0,09 pN. Esto es aproximadamente la fuerza de resistencia que experimenta una bacteria al nadar por el agua.
El coeficiente de resistencia de una esfera puede determinarse para el caso general de un flujo laminar con números de Reynolds inferiores a 1 utilizando la siguiente fórmula:[14]
Para números de Reynolds inferiores a 1, se aplica la ley de Stokes y el coeficiente de resistencia se aproxima a !
Aerodinámica
[editar]En aerodinámica, la resistencia aerodinámica es la fuerza de resistencia del fluido que actúa sobre cualquier cuerpo sólido en movimiento en la dirección del flujo libre del fluido.[15] Desde la perspectiva del cuerpo (enfoque de campo cercano), la resistencia resulta de las fuerzas debidas a las distribuciones de presión sobre la superficie del cuerpo, simbolizadas , y las fuerzas debidas a la fricción de la piel, que es un resultado de la viscosidad, denotada . Alternativamente, calculada desde la perspectiva del campo de flujo (enfoque de campo lejano), la fuerza de resistencia es el resultado de tres fenómenos naturales: onda de choque, hoja de vórtice y viscosidad.
Resumen
[editar]La distribución de presión que actúa sobre la superficie de un cuerpo ejerce fuerzas normales sobre el mismo. Esas fuerzas pueden sumarse y la componente de esa fuerza que actúa aguas abajo representa la fuerza de resistencia, , debida a la distribución de presión que actúa sobre el cuerpo. La naturaleza de estas fuerzas normales combina efectos de ondas de choque, efectos de generación de sistemas de vórtices y mecanismos viscosos de estela.
La viscosidad del fluido tiene un efecto importante en la resistencia. En ausencia de viscosidad, las fuerzas de presión que actúan para retrasar el vehículo son canceladas por una fuerza de presión situada más atrás que actúa para empujar el vehículo hacia delante; esto se llama recuperación de presión y el resultado es que la resistencia es nula. Es decir, el trabajo que la carrocería realiza sobre el flujo de aire, es reversible y se recupera al no existir efectos de fricción que conviertan la energía del flujo en calor. La recuperación de la presión actúa incluso en el caso de un flujo viscoso. La viscosidad, sin embargo, da lugar a la resistencia por presión y es el componente dominante de la resistencia en el caso de los vehículos con regiones de flujo separado, en las que la recuperación de la presión es bastante ineficaz.
La fuerza de resistencia por fricción, que es una fuerza tangencial sobre la superficie de la aeronave, depende sustancialmente de la configuración de la capa límite y de la viscosidad. La resistencia neta por fricción, , se calcula como la proyección aguas abajo de las fuerzas viscosas evaluadas sobre la superficie del cuerpo.
La suma de la resistencia por fricción y la resistencia por presión (forma) se denomina resistencia viscosa. Este componente de resistencia se debe a la viscosidad. Desde una perspectiva termodinámica, los efectos viscosos representan fenómenos irreversibles y, por lo tanto, crean entropía. La resistencia viscosa calculada utiliza los cambios de entropía para predecir con precisión la fuerza de resistencia.
Cuando el avión produce sustentación, resulta otra componente de resistencia . Resistencia inducida, simbolizado , se debe a una modificación de la distribución de la presión debida al sistema de vórtices de resistencia que acompaña a la producción de sustentación. Una perspectiva alternativa sobre la sustentación y la resistencia se obtiene al considerar el cambio de momento del flujo de aire. El ala intercepta el flujo de aire y lo obliga a desplazarse hacia abajo. Esto da lugar a una fuerza igual y opuesta que actúa hacia arriba en el ala, que es la fuerza de sustentación. El cambio de momento del flujo de aire hacia abajo resulta en una reducción del momento hacia atrás del flujo que es el resultado de una fuerza que actúa hacia adelante en el flujo de aire y que es aplicada por el ala al flujo de aire; una fuerza igual pero opuesta actúa en el ala hacia atrás que es la resistencia inducida. Otro componente de la resistencia aerodinámica, a saber, la resistencia ondulatoria, , resulta de las ondas de choque en las velocidades de vuelo transónicas y supersónicas. Las ondas de choque inducen cambios en la capa límite y en la distribución de la presión sobre la superficie del cuerpo.
En resumen, hay tres formas de clasificar la resistencia aerodinámica.[16] : 19
- Resistencia por presión y resistencia por fricción
- Resistencia de perfil y resistencia inducido
- Resistencia de vórtice, resistencia de onda y resistencia de estela
Historia
[editar]La idea de que un cuerpo en movimiento que atraviesa el aire u otro fluido encuentra resistencia se conocía desde la época de Aristóteles. Según Mervyn O'Gorman, esta idea fue bautizada como "resistencia" por Archibald Reith Low.[17] El artículo de Louis Charles Breguet de 1922 inició los esfuerzos para reducir la resistencia mediante la aerodinámica.[18] Breguet puso en práctica sus ideas diseñando varios aviones que batieron récords en las décadas de 1920 y 1930. La teoría de la capa límite de Ludwig Prandtl en la década de 1920 proporcionó el impulso para minimizar la fricción de la piel. Otro gran llamamiento a la aerodinámica fue realizado por Sir Melvill Jones, que aportó los conceptos teóricos para demostrar con rotundidad la importancia de la aerodinámica en el diseño de aviones.[19][20][21] En 1929, su artículo "The Streamline Airplane" presentado a la Royal Aeronautical Society fue fundamental. Propuso un avión ideal que tuviera una resistencia mínima, lo que condujo a los conceptos de monoplano "limpio" y tren de aterrizaje retráctil. El aspecto del artículo de Jones que más sorprendió a los diseñadores de la época fue su gráfico de la potencia requerida en función de la velocidad, para un avión real y uno ideal. Si se observa un punto de datos para un avión determinado y se extrapola horizontalmente a la curva ideal, se puede ver la ganancia de velocidad para la misma potencia. Cuando Jones terminó su presentación, un miembro del público describió los resultados como del mismo nivel de importancia que el ciclo de Carnot en termodinámica.[18][19]
Resistencia inducida por la sustentación y resistencia parásita
[editar]Resistencia inducida por la sustentación
[editar]La resistencia inducida por la sustentación (también llamada resistencia inducida) es la resistencia que se produce como resultado de la creación de una sustentación en un fuselaje sustentador tridimensional, como el ala o el fuselaje de un avión. La resistencia inducida consta principalmente de dos componentes: la resistencia debida a la creación de vórtices de resistencia (resistencia de vórtice); y la presencia de una resistencia viscosa adicional (resistencia viscosa inducida por la sustentación) que no está presente cuando la sustentación es nula. Los vórtices de resistencia en el campo de flujo, presentes en la estela de un cuerpo que se eleva, se derivan de la mezcla turbulenta del aire de arriba y de abajo del cuerpo que fluye en direcciones ligeramente diferentes como consecuencia de la creación de sustentación.
Si los demás parámetros no varían, a medida que la fuerza de sustentación generada por un cuerpo aumenta, también lo hace la resistencia inducida por la sustentación. Esto significa que a medida que el ángulo de ataque del ala aumenta (hasta un máximo llamado ángulo de pérdida), el coeficiente de sustentación también aumenta, y también lo hace la resistencia inducida por la sustentación. Al inicio de la entrada en pérdida, la sustentación disminuye bruscamente, al igual que la resistencia inducida por la sustentación, pero la resistencia por presión viscosa, un componente de la resistencia parásita, aumenta debido a la formación de un flujo turbulento no adherido en la estela detrás del cuerpo.
Resistencia parasitaria
[editar]La resistencia parásita, o resistencia de perfil, es la resistencia causada por el movimiento de un objeto sólido a través de un fluido. La resistencia parásita está formada por múltiples componentes, incluyendo la resistencia por presión viscosa ('resistencia de forma), y la resistencia debida a la rugosidad de la superficie (resistencia por fricción de la piel). Además, la presencia de varios cuerpos en relativa proximidad puede provocar la llamada resistencia por interferencia, que a veces se describe como un componente de la resistencia parásita.
En la aviación, la resistencia inducida tiende a ser mayor a bajas velocidades porque se requiere un alto ángulo de ataque para mantener la sustentación, creando más resistencia. Sin embargo, a medida que la velocidad aumenta, el ángulo de ataque puede reducirse y la resistencia inducida disminuye. La resistencia parásita, sin embargo, aumenta porque el fluido fluye más rápidamente alrededor de los objetos que sobresalen aumentando la fricción o la resistencia. A velocidades aún mayores ( velocidades transónicas), entra en escena la resistencia ondulatoria. Cada una de estas formas de resistencia cambia en proporción a las otras en función de la velocidad. Por lo tanto, la curva de resistencia global combinada muestra un mínimo a cierta velocidad del aire: un avión que vuela a esta velocidad estará en o cerca de su eficiencia óptima. Los pilotos utilizarán esta velocidad para maximizar la resistencia (consumo mínimo de combustible), o para maximizar la planeo en caso de fallo del motor.
Curva de potencia en aviación
[editar]
La interacción de la resistencia parásita e inducida frente a la velocidad del aire puede representarse como una curva característica, ilustrada aquí. En la aviación, a menudo se denomina curva de potencia, y es importante para los pilotos porque muestra que, por debajo de una determinada velocidad aerodinámica, el mantenimiento de la velocidad aerodinámica requiere contraintuitivamente más empuje a medida que la velocidad disminuye, en lugar de menos. Las consecuencias de estar "detrás de la curva" en vuelo son importantes y se enseñan como parte de la formación de los pilotos. En las velocidades subsónicas en las que la forma de "U" de esta curva es significativa, la resistencia a las olas aún no se ha convertido en un factor, por lo que no se muestra en la curva.
Resistencia ondulatoria en flujo transónico y supersónico
[editar]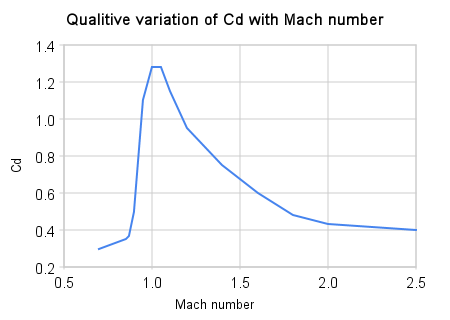
La resistencia a las olas (también llamada resistencia a la compresión) es la resistencia que se crea cuando un cuerpo se mueve en un fluido compresible y a velocidades cercanas a la velocidad del sonido en ese fluido. En aerodinámica, la resistencia ondulatoria consta de múltiples componentes en función del régimen de velocidad del vuelo.
En el vuelo transónico (números de Mach superiores a 0,8 e inferiores a 1,4 aproximadamente), la resistencia ondulatoria es el resultado de la formación de ondas de choque en el fluido, que se forman cuando se crean zonas locales de flujo supersónico (número de Mach superior a 1,0). En la práctica, el flujo supersónico se produce en cuerpos que viajan muy por debajo de la velocidad del sonido, ya que la velocidad local del aire aumenta al acelerar sobre el cuerpo hasta alcanzar velocidades superiores a Mach 1,0. Sin embargo, el flujo supersónico completo sobre el vehículo no se desarrollará hasta bien pasado Mach 1,0. Las aeronaves que vuelan a velocidad transónica a menudo incurren en la resistencia a las olas en el curso normal de sus operaciones. En el vuelo transónico, la resistencia a las olas se denomina comúnmente resistencia a la compresión transónica. La resistencia a la compresión transónica aumenta significativamente a medida que la velocidad de vuelo aumenta hacia Mach 1,0, dominando otras formas de resistencia a esas velocidades.
En el vuelo supersónico (números de Mach superiores a 1,0), la resistencia ondulatoria es el resultado de las ondas de choque presentes en el fluido y adheridas al cuerpo, normalmente ondas de choque oblicuas' formadas en los bordes de ataque y de salida del cuerpo. En flujos altamente supersónicos, o en cuerpos con ángulos de giro suficientemente grandes, se formarán en cambio ondas de choque no adheridas, u ondas de proa. Además, pueden producirse zonas locales de flujo transónico detrás de la onda de choque inicial a velocidades supersónicas más bajas, y pueden dar lugar al desarrollo de ondas de choque adicionales, más pequeñas, presentes en las superficies de otros cuerpos de elevación, similares a las que se encuentran en los flujos transónicos. En los regímenes de flujo supersónico, la resistencia a las ondas se suele separar en dos componentes, resistencia a las ondas dependiente de la sustentación supersónica y resistencia a las ondas dependiente del volumen supersónico.
La solución de forma cerrada para la mínima resistencia de onda de un cuerpo de revolución con una longitud fija fue encontrada por Sears y Haack, y se conoce como la Distribución Sears-Haack'. Del mismo modo, para un volumen fijo, la forma para la mínima resistencia de onda es la Ojiva de Von Karman.
El concepto teórico del biplano de Busemann no está sujeto a la resistencia a las olas cuando funciona a su velocidad de diseño, pero es incapaz de generar sustentación en esta condición.
Paradoja de d'Alembert
[editar]En 1752 d'Alembert demostró que el flujo potencial, la teoría de vanguardia del siglo XVIII sobre el flujo no viscoso susceptible de soluciones matemáticas, daba como resultado la predicción de una resistencia cero. Esto se contradice con las pruebas experimentales y se conoce como la paradoja de d'Alembert. En el siglo XIX las ecuaciones de Navier-Stokes para la descripción del flujo viscoso fueron desarrolladas por Saint-Venant, Navier y Stokes. Stokes dedujo la resistencia alrededor de una esfera a número de Reynolds muy bajo, cuyo resultado se denomina ley de Stokes.[22]
En el límite de números de Reynolds elevados, las ecuaciones de Navier-Stokes se aproximan a las ecuaciones de Euler, de las que las soluciones de flujo potencial consideradas por d'Alembert son soluciones. Sin embargo, todos los experimentos a números de Reynolds elevados mostraron que hay resistencia. Los intentos de construir soluciones de flujo estacionario invisibles para las ecuaciones de Euler, distintas de las soluciones de flujo potencial, no dieron resultados realistas.[22]
La noción de capa límite -introducida por Prandtl en 1904, basada tanto en la teoría como en los experimentos- explicaba las causas de la resistencia aerodinámica a altos números de Reynolds. La capa límite es la delgada capa de fluido cercana al límite del objeto, donde los efectos viscosos siguen siendo importantes incluso cuando la viscosidad es muy pequeña (o equivalentemente el número de Reynolds es muy grande).[22]
Véase también
[editar]- Masa añadida
- Fuerza aerodinámica
- Ángulo de ataque
- Densidad del aire
- Coeficiente de resistencia en automóviles
- Capa límite
- Efecto Coandă
- Crisis de resistencia
- Coeficiente de resistencia
- Ecuación de resistencia
- Número de Keulegan-Carpenter
- Sustentación
- Ecuación de Morison
- Diseño del cono de morro
- Resistencia parásita
- Movimiento parabólico
- Presión de resistencia
- Número de Reynolds
- Entrada en pérdida
- Ley de Stokes
- Velocidad terminal
- Resistencia ondulatoria
- Resistencia del viento
Referencias
[editar]- ↑ Hernández-Gómez, J J; Marquina, V; Gómez, R W (25 de julio de 2013). «On the performance of Usain Bolt in the 100 m sprint». Eur. J. Phys. (IOP) 34 (5): 1227. doi:10.1088/0143-0807/34/5/1227. Consultado el 23 de abril de 2016.
- ↑ Enciclopedia de Ingeniería de Automoción, David Crolla, Documento "Fundamentos, Principios básicos en la aerodinámica y diseño de vehículos de carretera", ISBN 978 0 470 97402 5
- ↑ The Design Of The Aeroplane, Darrol Stinton, ISBN 0 632 01877 1, p.204
- ↑ Fundamentals of Flight, Second Edition, Richard S. Shevell,ISBN 0 13 339060 8, p.185
- ↑ Un estudio de caso de Aerospatiale y British Aerospace sobre el Concorde por Jean Rech y Clive S. Leyman,AIAA Professional Study Series, Fig. 3.6
- ↑ Design For Air Combat, Ray Whitford,ISBN 0 7106 0426 2, p.212
- ↑ Téngase en cuenta que para la atmósfera terrestre, la densidad del aire se puede encontrar utilizando la fórmula barométrica. Es 1.293 kg/m3 a 0 °C y 1 atmósfera.
- ↑ a b Liversage, P., y Trancossi, M. (2018). Analysis of triangular sharkskin profiles according to second law, Modelling, Measurement and Control B. 87(3), 188-196. http://www.iieta.org/sites/default/files/Journals/MMC/MMC_B/87.03_11.pdf
- ↑ Brian Beckman (1991). «Part 6: Speed and Horsepower». Archivado desde el original el 16 de junio de 2016. Consultado el 18 de mayo de 2016.
- ↑ Haldane, J.B.S., "On Being the Right Size" Archivado el 22 de agosto de 2011 en Wayback Machine.
- ↑ «Drag Force». Archivado desde el original el 14 de abril de 2008. Consultado el 26 de septiembre de 2022.
- ↑ Air friction, from Department of Physics and Astronomy, Georgia State University
- ↑ Collinson, Chris; Roper, Tom (1995). Particle Mechanics. Butterworth-Heinemann. p. 30. ISBN 9780080928593.
- ↑ tec-science (31 de mayo de 2020). «Drag coefficient (friction and pressure drag)». tec-science (en inglés estadounidense). Consultado el 25 de junio de 2020.
- ↑ Anderson, John D. Jr, Introduction to Flight
- ↑ Gowree, Erwin Ricky (20 de mayo de 2014). Influencia del flujo de la línea de sujeción en la resistencia aerodinámica de la forma (doctoral). Consultado el 22 de marzo de 2022.
- ↑ https://archive.org/details/Flight_International_Magazine_1913-02-01-pdf/page/n19/mode/2up Flight, 1913, p. 126
- ↑ a b Anderson, John David (1929). Una historia de la aerodinámica: Y su impacto en las máquinas voladoras. Universidad de Cambridge.
- ↑ a b «Departamento de Ingeniería de la Universidad de Cambridge». Consultado el 28 de enero de 2014.
- ↑ Sir Morien Morgan, Sir Arnold Hall (noviembre de 1977). Biographical Memoirs of Fellows of the Royal Society Bennett Melvill Jones. 28 de enero de 1887 -- 31 de octubre de 1975 23. The Royal Society. pp. 252-282.
- ↑ Mair, W.A. (1976). Diccionario Oxford de Biografía Nacional.
- ↑ a b c Batchelor (2000), pp. 337-343.
Bibliografía
[editar]- French, A. P. (1970). Newtonian Mechanics (The M.I.T. Introductory Physics Series) (1st edición). W. W. Norton & Company Inc., New York. ISBN 978-0-393-09958-4.
- G. Falkovich (2011). Fluid Mechanics (A short course for physicists). Cambridge University Press. ISBN 978-1-107-00575-4.
- Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (6th edición). Brooks/Cole. ISBN 978-0-534-40842-8. (requiere registro).
- Tipler, Paul (2004). Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics (5th edición). W. H. Freeman. ISBN 978-0-7167-0809-4.
- Huntley, H. E. (1967). Dimensional Analysis. Dover. LOC 67-17978.
- Batchelor, George (2000). An introduction to fluid dynamics. Cambridge Mathematical Library (2nd edición). Cambridge University Press. ISBN 978-0-521-66396-0. MR 1744638.
- L. J. Clancy (1975), Aerodynamics, Pitman Publishing Limited, London. ISBN 978-0-273-01120-0
- Anderson, John D. Jr. (2000); Introduction to Flight, Fourth Edition, McGraw Hill Higher Education, Boston, Massachusetts, USA. 8th ed. 2015, ISBN 978-0078027673.
Enlaces externos
[editar]- Educational materials on air resistance
- Aerodynamic Drag and its effect on the acceleration and top speed of a vehicle.
- Vehicle Aerodynamic Drag calculator based on drag coefficient, frontal area and speed.
- Smithsonian National Air and Space Museum's How Things Fly website
- Effect of dimples on a golf ball and a car
| Control de autoridades |
|
|---|
Datos: Q206621
Multimedia: Drag (fluid dynamics) / Q206621