User:Acheung17/PowerWheel
Week 0 Activities
[edit | edit source]Project Preference
[edit | edit source]- Autonomous Power Wheel
- Mobile Robot Hallway Navigation
- Wind Turbine
Problem Statement
[edit | edit source]The goal of the project is to create a fully autonomous power wheel, capable of using two coordinates and driving from point A to point B and avoiding obstacles along the way. For this part of the project the teams goal is to design a prototype that will be able to control a power wheel and drive a predetermined course.
Project Plan
[edit | edit source]The group's goals for this part of the project will be to create prototypes of the steering and accelerator controls, create the programs to control the power wheel, and incorporate it all into a design to fit in the power wheel.
Week 1 Narrative
[edit | edit source]


This week the group researched the previous teams reports and gathered information on the progress they have made. We looked into past projects and concluded the goals for the next four weeks was to create a new pedal depressor for the accelerator, design a way to attach the steering, design a platform to attach to the power wheel, and program the arduino to be able to navigate the power wheel around a square course.
I researched the previous groups design for the gas pedal. The past groups have a working code for the motor that will depress the gas pedal. The past groups design was to have a a screw mechanism that would spin a nut that would push a piston into the gas pedal. We will use the concept and previous written code, but will redesign the piston that will depress the gas pedal. The original design was to have brackets on the side of the piston to go round the gas pedal so the piston will not spin. The brackets were hitting the wall of the power wheel and could not full depress the gas pedal. The new design will remove the brackets and elongate the new piston, and to have a rounded tip. The piston will have a square shaped shaft that will be inside a similarity shaped bracket that will guide the piston to the gas pedal.
Week 2 Narrative
[edit | edit source]Platform
I finalized the design for the prototype platform. It will be a piece of plywood with a mock steering wheel and mock gas pedal and enough room to attach the actuator, motor, arduino, and batteries. The steering wheel will be a circular piece of wood attached to a steel castor and attached to a wooden column at an angle matching that of the steering wheel. For the pedal, it will be a brass door hinge attached to a wooden wedge. There will be a nail going through one of the holes to keep a spring in place to give the pedal some resistance when the piston pushes on it.
Pedal
This week for the project I finalized the design for the gas pedal piston. The piston needed to have a .5 inch hole going through it to allow for the screw mechanism to fit in. If the hole was smaller it would not fit, if the hole was larger there would be to much room and the piston would not be stable. I designed the face of the piston, the spot where it will be in contact with the pedal, to be on an angle so when the pedal is fully depressed the whole face of the piston will be in contact with the pedal. Also if the face of the piston is on an angle there is less of a chance for the piston to get snagged on the grooves of the pedal causing a possible failure. There is also a rectangular hole that will be .5 inches from the back of the piston going through the side of the piston. This is an access point where we can put the nut in and then through the back of the piston, thread the screw mechanism of the motor in. The hole needs to be .5 inch wide and 12/16 inch long to allow access for the nut, but also so the nut will not rotate inside the piston causing the piston to not move forward. The dimensions for the piston is 2 inch x 2 inch x 5 inch. This is so that the face of the piston is approximately the size of the pedal to allow better contact with the pedal.
Steering
For the steering wheel I researched the amount of force needed to turn the wheel. The linear actuator, Miniature Linear Motion Series L16 (Miniature Linear Motion Series L16 Data Sheet), can exert a maximum of 100 Newtons of force and retract with a maximum of 46 Newtons of force. The past groups found that the wheel needs 86.6 Newtons at 8.3 cm from the center of the steering wheel to turn. Using the equation:
τ = r X F
Torque = Radius x Force
I was able to find the actuator was capable of pulling back the steering wheel at that length. But further research into the design and the options how to mount the actuator on the steering wheel we need to have two pivot points, one at the base of the actuator and one at the point where the actuator and the lever connect. With that the actuator will not be always perpendicular with the lever to apply the force. We need to account for the loss of torque at different angles as the steering wheel is turned by the actuator. To find the correct length of the lever and the angles that the lever will be with the actuator I will use the equation:
τ = r x F x Sin θ
Torque = Radius x Force x Sin θ
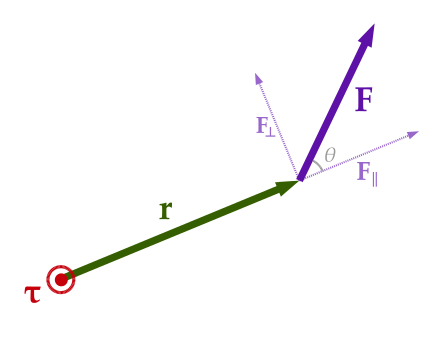
θ will be the angle which the force is being applied. Doing this we can see much force is lost in changing the angle in which the force is applied. When the force is applied at 90 degrees the full amount of the force is applied to the lever, but when the force is being applied at an angle, the force that is applied in the direction in which you want the lever to go is a fraction of the overall force being applied. To find that new force we need to find the component vectors and to do that we need the force times Sin θ to get the amount of force being applied perpendicular to the lever.
Now I know that there will be less force applied as the angle in which the force is being applied gets bigger, I need to find what is the largest angle to figure out the minimum length needed for the lever for the actuator to still have enough force to turn the wheel. To find that I also need to find the angle of attachment point to the platform, so I can find the midway point for the actuator going in a strait line and is perpendicular to the lever. When I have that angle I can figure out the rest of my measurements.
Week 3 Narrative
[edit | edit source]Week three my goals were to finish the design for the steering mechanism. For the steering I needed to find the length of the lever, design of the lever.
Length of Lever
The steering wheel turns 80 degrees, 40 degrees in each direction. I need to find the length of the actuator when the power wheel is going straight. The steering wheel is angled at 45 degrees above the horizon line and the height of the center of the steering wheel from the platform is 17.5 cm, to account for the 3/4 inch plywood that will be used for the base of the platform I subtract 2 cm, to get a height of 15.5 cm. Knowing that I can calculate the amount of change in the angle where the linear actuator connects to the lever.
Using the Pythagorean Theorem I know the legnth of the actuator.
15.52 + 15.52 = C2
C = 21.92 cm
Length of the actuator needs to be 22 cm.
Since the actuator has more force exerting then retracting, I only need to do one calculation for the retracting since exerting will have more than enough force to turn the wheel. The change in the angle will also be 40 degrees so the new resulting angle will be 50 degrees in which the force will be applied to the actuator. With the info from last week that the wheel needs 86 N at 8.3 cm I figure the amount of torque needed to turn the wheel is 713.8 N/cm.
713.8 N/cm = 86 N x 8.3 cm
The torque will still be the same, 713.8 N/cm, and the amount of force of the linear actuator retracting will still be the same, 46 N, and the resulting angle of which the force will be applied is 50 degrees, I can figure out the length of the lever.
713.8 N/cm = Length of lever x 46 N x Sin 50 degrees
Length of lever = 20.26 cm from the center of the steering wheel.
The minimum length for the steering wheel needs to be 20.26 cm from the center of the steering wheel.
Design
The lever itself needs to have certain criteria: weight, strength, ease of installation, complexity of construction, adjustable, and size. To find the best solution for the lever design I made a design matrix.
| Concept | |
|---|---|
| a | Wooden lever with metal brackets |
| b | Metal lever with brMetal lever with bracketsackets |
| c | Plastic lever with clips |
| a | b | c | |
| Complexity of construction | 4 | 2 | 1 |
| Ease of installation | 4 | 3 | 4 |
| Adjustable | 4 | 2 | 1 |
| Strength | 3 | 4 | 2 |
| Weight | 2 | 3 | 4 |
| Size | 3 | 4 | 4 |
| 20 | 18 | 16 |
With that I chose the wooden lever as the best option for the design. On the prototype we will use a wooden lever screwed onto the mock steering wheel. For the actual design we will use metal brackets and screws, so the lever can be installed and removed with out damaging the power wheel.
Week 4 Narrative
[edit | edit source]During week 4 we finished the code for the miniature linear actuator and for the pedal piston, finished the mock up for the prototype platform, and finalized the design.
Arduino Code
The code was tested for the pedal piston and it is working properly. The code is set on a loop and will extend out for a set period of time, stay extended for a set period of time, and then retracted for a set period of time. The motor and pedal piston was tested with the pedal on the power wheel and with the mock pedal for the prototype platform and both work properly to depress pedal. The next group will need to adjust the timing for how long the motor extends, stays extended, and retracts to gain the proper results desired.
We finished the linear actuator and the code was working at one point. The miniature linear actuator, during testing, appeared to smoke and has become non responsive. After trying different methods to get the actuator to work, using AC power, DC power, and the Arduino, we conclude the actuator is broken and needs to be replaced. The next group can test the code written when a new miniature linear actuator is bought.
Pedal Assembly
The pedal piston for the prototype can be used right in the actual Power Wheel. The bracket that was made for the piston was too big, allowing for the pedal piston to spin and not extend, and does not properly guide the piston to the pedal. In the mean time to solve the issue wooden blocks are used on the mock prototype platform to simulate the mounting bracket. These blocks did work to keep the pedal piston from spinning and guides the piston into the pedal. The next group will need to finish the assembly by 3D printing another mounting bracket for the pedal piston.
Steering Assembly
The steering assembly for the mock prototype platform is finished. The mock steering wheel is made and attached with a wooden lever. The lever has a series of holes drilled out at one inch increments to allow for adjustment to the lever length. If further adjustments are needed, more holes can be drilled to customize the length the lever. Since the linear actuator was broken there is no way to test the concept physically. The next group will need to build the prototype lever, using a wooden bar and U shaped pipe brackets to attach to the steering wheel on both sides. The length of the lever needs to be tested to find the correct length needed when a new miniature linear actuator is bought.
Finalized Design
The mock prototype platform is complete and can be tested when a new miniature linear actuator is bought. The components, the linear actuator, the pedal assembly, and the Arduino, can be removed from the mock up and placed in the Power Wheel. The next group will need to make the lever with brackets and the mounting bracket for the pedal piston. The code is complete for both the steering and for the pedal assembly. The next group, for the implement part of the report, will need to measure the amount of time the Power Wheel needs to turn and to break and with that information adjust the times on the code to allow the Power Wheel to complete a figure 8.