线性代数
A
=
[
1
2
3
4
]
{\displaystyle \mathbf {A} ={\begin{bmatrix}1&2\\3&4\end{bmatrix}}}
向量 · 向量空间 · 基底 · 行列式 · 矩阵
QR分解法 是一種将矩阵分解 的方式。這種方式,把矩阵 分解成一个正交矩阵 与一个上三角矩阵 的积。QR分解经常用来解线性最小二乘法 问题。QR分解也是特定特征值算法 即QR算法 的基础。
任何方块矩阵 A都可以分解為
A
=
Q
R
{\displaystyle A=QR}
其中Q 是正交矩阵 (意味着Q T Q = I )而R 是上三角矩阵 。如果A 是非奇异 的,且限定R 的对角线元素为正,则这个因数分解是唯一的。
更一般的说,我们可以因数分解复数
m
{\displaystyle m}
n
{\displaystyle n}
m ≥ n )为
m
{\displaystyle m}
n
{\displaystyle n}
幺正矩阵 (在Q ∗ Q = I 的意义上,不需要是方阵)和
n
{\displaystyle n}
n
{\displaystyle n}
Q 是
m
{\displaystyle m}
m
{\displaystyle m}
m
{\displaystyle m}
n
{\displaystyle n}
更一般地,我們可以將m ×n 的A 矩陣,其中m ≥ n m ×m 酉矩阵 Q 和m ×n 三角矩陣R 的乘積。由於m ×n 上三角矩陣的底部(m −n )行完全由零組成,因此對R 或R 和Q 進行分解通常很有用:
A
=
Q
R
=
Q
[
R
1
0
]
=
[
Q
1
Q
2
]
[
R
1
0
]
=
Q
1
R
1
,
{\displaystyle A=QR=Q{\begin{bmatrix}R_{1}\\0\end{bmatrix}}={\begin{bmatrix}Q_{1}&Q_{2}\end{bmatrix}}{\begin{bmatrix}R_{1}\\0\end{bmatrix}}=Q_{1}R_{1},}
其中R 1 是n ×n 上三角矩陣,0是(m − n )×n 零矩陣,Q 1 是m ×n ,Q 2 是m ×(m − n )Q 1 和Q 2 都是有正交列。
Golub & Van Loan (1996 ,§5.2) harvtxt模板錯誤: 無指向目標: CITEREFGolubVan_Loan1996 (幫助 ) call Q 1 R 1 the thin QR factorization of A ; Trefethen and Bau call this the reduced QR factorization .[ 1] A is of full rank n and we require that the diagonal elements of R 1 are positive then R 1 and Q 1 are unique, but in general Q 2 is not. R 1 is then equal to the upper triangular factor of the Cholesky decomposition of A * A (= A T A if A is real).
类似的,我们可以定义A的QL,RQ和LQ分解。其中L是下三角矩陣。
QR分解的实际计算有很多方法,例如Givens旋转 、Householder变换 ,以及Gram-Schmidt正交化 等等。每一种方法都有其优点和不足。
Householder变换 将一个向量关于某个平面 或者超平面 进行反射。我们可以利用这个操作对
m
×
n
(
m
≧
n
)
{\displaystyle m\times n(m\geqq n)}
A
{\displaystyle A}
矩阵
Q
{\displaystyle Q}
令
x
{\displaystyle \mathbf {x} }
A
{\displaystyle A}
m 维实列向量,且有
‖
x
‖
=
|
α
|
{\displaystyle \|\mathbf {x} \|=|\alpha |}
α
{\displaystyle \alpha }
浮点数 实现的,则
α
{\displaystyle \alpha }
x
{\displaystyle \mathbf {x} }
k
{\displaystyle k}
x
k
{\displaystyle x_{k}}
α
=
−
e
i
arg
x
k
‖
x
‖
{\displaystyle \alpha =-\mathrm {e} ^{\mathrm {i} \arg x_{k}}\|\mathbf {x} \|}
(Stoer & Bulirsch 2002 ,第225頁) harv模板錯誤: 無指向目標: CITEREFStoerBulirsch2002 (幫助 ) ,并且在接下来矩阵
Q
{\displaystyle Q}
接下来,设
e
1
{\displaystyle \mathbf {e} _{1}}
(
1
,
0
,
⋯
,
0
)
T
{\displaystyle (1,0,\cdots ,0)^{T}}
欧几里德范数 ,
I
{\displaystyle I}
m
×
m
{\displaystyle m\times m}
u
=
x
−
α
e
1
{\displaystyle \mathbf {u} =\mathbf {x} -\alpha \mathbf {e} _{1}}
v
=
u
‖
u
‖
{\displaystyle \mathbf {v} ={\mathbf {u} \over \|\mathbf {u} \|}}
Q
=
I
−
2
v
v
T
{\displaystyle Q=I-2\mathbf {v} \mathbf {v} ^{T}}
或者,若
A
{\displaystyle A}
Q
=
I
−
(
1
+
w
)
v
v
H
{\displaystyle Q=I-(1+w)\mathbf {v} \mathbf {v} ^{H}}
w
=
x
H
v
/
v
H
x
{\displaystyle w=\mathbf {x} ^{H}\mathbf {v} \mathbf {/} \mathbf {v} ^{H}\mathbf {x} }
式中
x
H
{\displaystyle \mathbf {x} ^{H}}
x
{\displaystyle x}
共轭转置 (亦称埃尔米特共轭 或埃尔米特转置 )。 则
Q
{\displaystyle Q}
m
×
m
{\displaystyle m\times m}
Q
x
=
(
α
,
0
,
⋯
,
0
)
T
{\displaystyle Q\mathbf {x} =(\alpha ,0,\cdots ,0)^{T}\ }
利用Householder矩阵,可以将一个
m
×
n
{\displaystyle m\times n}
A
′
{\displaystyle A'}
x
{\displaystyle x}
Q
1
{\displaystyle Q_{1}}
Q
1
A
{\displaystyle Q_{1}A}
Q
1
A
=
[
α
1
⋆
…
⋆
0
⋮
A
′
0
]
{\displaystyle Q_{1}A={\begin{bmatrix}\alpha _{1}&\star &\dots &\star \\0&&&\\\vdots &&A'&\\0&&&\end{bmatrix}}}
这个过程对于矩阵
A
′
{\displaystyle A'}
Q
1
A
{\displaystyle Q_{1}A}
Q
2
{\displaystyle Q_{2}}
Q
2
{\displaystyle Q_{2}}
Q
1
{\displaystyle Q_{1}}
Q
1
A
{\displaystyle Q_{1}A}
A
{\displaystyle A}
Q
2
{\displaystyle Q_{2}}
Q
k
=
[
I
k
−
1
0
0
Q
k
′
]
{\displaystyle Q_{k}={\begin{bmatrix}I_{k-1}&0\\0&Q_{k}'\end{bmatrix}}}
将这个迭代过程进行
t
{\displaystyle t}
t
=
min
(
m
−
1
,
n
)
{\displaystyle t=\min(m-1,n)}
R
=
Q
t
⋯
Q
2
Q
1
A
{\displaystyle R=Q_{t}\cdots Q_{2}Q_{1}A}
其中R为一个上三角矩阵。因此,令
Q
=
Q
1
T
Q
2
T
⋯
Q
t
T
,
{\displaystyle Q=Q_{1}^{T}Q_{2}^{T}\cdots Q_{t}^{T},}
则
A
=
Q
R
{\displaystyle A=QR}
A
{\displaystyle A}
相比与Gram-Schmidt正交化,使用Householder变换具有更好的数值稳定性 。
现在要用Householder变换求解矩阵
A
{\displaystyle A}
Q
R
{\displaystyle QR}
A
=
[
0
3
1
0
4
−
2
2
1
1
]
{\displaystyle A={\begin{bmatrix}0&3&1\\0&4&-2\\2&1&1\\\end{bmatrix}}}
因为
α
1
=
[
0
,
0
,
2
]
T
{\displaystyle \alpha _{1}=[0,\ 0,\ 2]^{T}}
a
1
=
|
|
α
1
|
|
2
=
2
{\displaystyle a_{1}=||\alpha _{1}||_{2}=2}
ω
1
=
α
1
−
a
1
e
1
|
|
α
1
−
a
1
e
1
|
|
2
=
1
2
[
−
1
,
0
,
1
]
T
{\displaystyle \omega _{1}={\frac {\alpha _{1}-a_{1}e_{1}}{||\alpha _{1}-a_{1}e_{1}||_{2}}}={\frac {1}{\sqrt {2}}}[-1,\ 0,\ 1]^{T}}
则有
H
1
=
I
−
2
ω
1
ω
1
H
=
[
0
0
1
0
1
0
1
0
0
]
{\displaystyle H_{1}=I-2\omega _{1}\omega _{1}^{H}={\begin{bmatrix}0&0&1\\0&1&0\\1&0&0\\\end{bmatrix}}}
从而,
H
1
A
=
[
2
1
1
0
4
−
2
0
3
1
]
{\displaystyle H_{1}A={\begin{bmatrix}2&1&1\\0&4&-2\\0&3&1\\\end{bmatrix}}}
记
β
=
[
4
,
3
]
T
{\displaystyle \beta =[4,\ 3]^{T}}
b
1
=
|
|
β
2
|
|
2
=
5
{\displaystyle b_{1}=||\beta _{2}||_{2}=5}
ω
2
=
β
2
−
b
1
e
1
|
|
β
2
−
b
1
e
1
|
|
2
=
1
10
[
−
1
,
3
]
T
{\displaystyle \omega _{2}={\frac {\beta _{2}-b_{1}e_{1}}{||\beta _{2}-b_{1}e_{1}||_{2}}}={\frac {1}{\sqrt {10}}}[-1,\ 3]^{T}}
H
2
^
=
I
−
2
ω
2
ω
H
=
1
5
[
4
3
3
−
4
]
{\displaystyle {\hat {H_{2}}}=I-2\omega _{2}\omega ^{H}={\frac {1}{5}}{\begin{bmatrix}4&3\\3&-4\\\end{bmatrix}}}
记,
H
2
=
[
1
0
T
0
H
2
^
]
=
[
1
0
0
0
4
5
3
5
0
3
5
−
4
5
]
{\displaystyle H_{2}={\begin{bmatrix}1&0^{T}\\0&{\hat {H_{2}}}\\\end{bmatrix}}={\begin{bmatrix}1&0&0\\0&{\frac {4}{5}}&{\frac {3}{5}}\\0&{\frac {3}{5}}&-{\frac {4}{5}}\\\end{bmatrix}}}
则,
R
=
H
2
(
H
1
A
)
=
[
2
1
1
0
5
−
1
0
0
−
2
]
{\displaystyle R=H_{2}(H_{1}A)={\begin{bmatrix}2&1&1\\0&5&-1\\0&0&-2\\\end{bmatrix}}}
那么
Q
=
H
1
H
2
=
1
5
[
0
3
−
4
0
4
3
5
0
0
]
{\displaystyle Q=H_{1}H_{2}={\frac {1}{5}}{\begin{bmatrix}0&3&-4\\0&4&3\\5&0&0\\\end{bmatrix}}}
吉文斯旋转表示为如下形式的矩阵
G
(
i
,
j
,
θ
)
=
[
1
⋯
0
⋯
0
⋯
0
⋮
⋱
⋮
⋮
⋮
0
⋯
c
⋯
−
s
⋯
0
⋮
⋮
⋱
⋮
⋮
0
⋯
s
⋯
c
⋯
0
⋮
⋮
⋮
⋱
⋮
0
⋯
0
⋯
0
⋯
1
]
{\displaystyle G(i,j,\theta )={\begin{bmatrix}1&\cdots &0&\cdots &0&\cdots &0\\\vdots &\ddots &\vdots &&\vdots &&\vdots \\0&\cdots &c&\cdots &-s&\cdots &0\\\vdots &&\vdots &\ddots &\vdots &&\vdots \\0&\cdots &s&\cdots &c&\cdots &0\\\vdots &&\vdots &&\vdots &\ddots &\vdots \\0&\cdots &0&\cdots &0&\cdots &1\end{bmatrix}}}
这里的 c = cos(θ ) 和 s = sin(θ ) 出现在第 i 行和第 j 行与第 i 列和第 j 列的交叉点上。就是说,吉文斯旋转矩阵的所有非零元定义如下::
g
k
k
=
1
for
k
≠
i
,
j
g
i
i
=
c
g
j
j
=
c
g
i
j
=
s
g
j
i
=
−
s
{\displaystyle {\begin{aligned}g_{k\,k}&{}=1\qquad {\text{for}}\ k\neq i,\,j\\g_{i\,i}&{}=c\\g_{j\,j}&{}=c\\g_{i\,j}&{}=s\\g_{j\,i}&{}=-s\end{aligned}}}
乘积 G (i , j , θ )x x 在 (i ,j )平面中的逆时针旋转 θ 弧度。
对于一个向量
A
=
[
a
b
]
{\displaystyle {\begin{array}{lcl}A&=&{\begin{bmatrix}a\\b\\\end{bmatrix}}\\\end{array}}}
如果,
r
=
a
2
+
b
2
{\displaystyle r={\sqrt {a^{2}+b^{2}}}}
c
=
a
r
{\displaystyle c={\frac {a}{r}}}
s
=
−
b
r
{\displaystyle s=-{\frac {b}{r}}}
A
{\displaystyle A}
A
2
_
S
u
b
=
[
c
−
s
s
c
]
[
a
b
]
=
[
r
0
]
{\displaystyle A_{2\_Sub}={\begin{bmatrix}c&-s\\s&c\\\end{bmatrix}}{\begin{bmatrix}a\\b\\\end{bmatrix}}={\begin{bmatrix}r\\0\\\end{bmatrix}}}
每一次的旋转,吉文斯旋转都可以将一个元素化成0,直到将原始矩阵转成一个上三角矩阵,则完成分解。
A
=
Q
R
{\displaystyle A=QR}
Q
=
G
1
T
G
2
T
⋯
G
k
T
{\displaystyle Q=G_{1}^{T}G_{2}^{T}\cdots G_{k}^{T}}
A
1
=
[
6
5
0
5
1
4
0
4
3
]
{\displaystyle A_{1}={\begin{bmatrix}6&5&0\\5&1&4\\0&4&3\\\end{bmatrix}}}
r
=
6
2
+
5
2
≈
7.8102
{\displaystyle r={\sqrt {6^{2}+5^{2}}}\approx 7.8102}
c
=
6
/
r
≈
0.7682
{\displaystyle c=6/r\approx 0.7682}
s
=
−
5
/
r
≈
−
0.6402
{\displaystyle s=-5/r\approx -0.6402}
A
2
=
G
1
A
1
=
[
c
−
s
0
s
c
0
0
0
1
]
[
6
5
0
5
1
4
0
4
3
]
≈
[
7.8102
4.4813
2.5607
0
−
2.4327
3.0729
0
4
3
]
{\displaystyle A_{2}=G_{1}A_{1}={\begin{bmatrix}c&-s&0\\s&c&0\\0&0&1\\\end{bmatrix}}{\begin{bmatrix}6&5&0\\5&1&4\\0&4&3\\\end{bmatrix}}\approx {\begin{bmatrix}7.8102&4.4813&2.5607\\0&-2.4327&3.0729\\0&4&3\\\end{bmatrix}}}
对于:
A
2
{\displaystyle A_{2}}
A
2
_
S
u
b
{\displaystyle A_{2\_Sub}}
A
2
_
S
u
b
=
[
−
2.4327
3.0729
4
3
]
{\displaystyle A_{2\_Sub}={\begin{bmatrix}-2.4327&3.0729\\4&3\\\end{bmatrix}}}
r
=
(
−
2.4327
)
2
+
4
2
≈
4.6817
{\displaystyle r={\sqrt {(-2.4327)^{2}+4^{2}}}\approx 4.6817}
c
=
−
2.4327
/
r
≈
−
0.5196
{\displaystyle c=-2.4327/r\approx -0.5196}
s
=
−
5
/
r
≈
−
0.8544
{\displaystyle s=-5/r\approx -0.8544}
G
2
A
2
=
[
1
0
0
0
c
−
s
0
s
c
]
[
7.8102
4.4813
2.5607
0
−
2.4327
3.0729
0
4
3
]
≈
[
7.8102
4.4813
2.5607
0
4.6817
0.9664
0
0
−
4.1843
]
{\displaystyle G_{2}A_{2}={\begin{bmatrix}1&0&0\\0&c&-s\\0&s&c\\\end{bmatrix}}{\begin{bmatrix}7.8102&4.4813&2.5607\\0&-2.4327&3.0729\\0&4&3\\\end{bmatrix}}\approx {\begin{bmatrix}7.8102&4.4813&2.5607\\0&4.6817&0.9664\\0&0&-4.1843\\\end{bmatrix}}}
R
=
G
2
A
2
=
G
2
G
1
A
1
{\displaystyle R=G_{2}A_{2}=G_{2}G_{1}A_{1}}
Q
=
G
1
T
G
2
T
=
[
0.7682
0.3327
0.5470
0.6402
−
0.3992
−
0.6564
0
0.8544
−
0.5196
]
{\displaystyle Q=G_{1}^{T}G_{2}^{T}={\begin{bmatrix}0.7682&0.3327&0.5470\\0.6402&-0.3992&-0.6564\\0&0.8544&-0.5196\\\end{bmatrix}}}
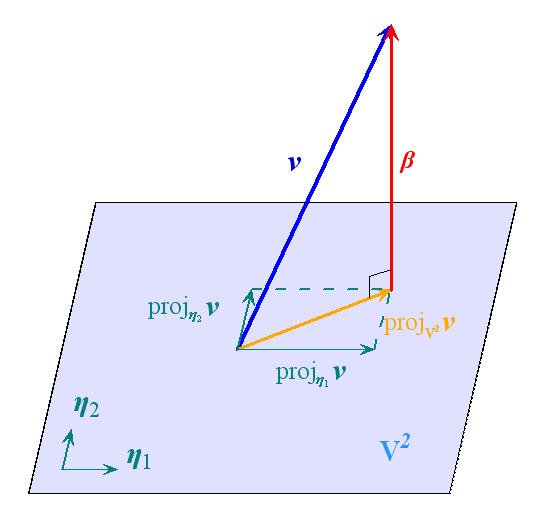
图1
v
{\displaystyle {\boldsymbol {v}}}
V
2
{\displaystyle {\boldsymbol {V}}^{2}}
V
3
{\displaystyle {\boldsymbol {V}}^{3}}
β
{\displaystyle {\boldsymbol {\beta }}}
格拉姆-施密特正交化的基本想法,是利用投影原理 在已有正交基的基础上构造一个新的正交基。
设
v
∈
V
n
{\displaystyle {\boldsymbol {v}}\in {\boldsymbol {V^{n}}}}
V
k
{\displaystyle {\boldsymbol {V}}^{k}}
V
n
{\displaystyle {\boldsymbol {V}}^{n}}
k
{\displaystyle k}
{
η
1
,
…
,
η
k
}
{\displaystyle \{{\boldsymbol {\eta }}_{1},\ldots ,{\boldsymbol {\eta }}_{k}\}}
v
{\displaystyle {\boldsymbol {v}}}
V
k
{\displaystyle {\boldsymbol {V}}^{k}}
v
{\displaystyle {\boldsymbol {v}}}
V
k
{\displaystyle {\boldsymbol {V}}^{k}}
p
r
o
j
V
k
v
{\displaystyle \mathrm {proj} _{\boldsymbol {V^{k}}}{\boldsymbol {v}}}
β
=
v
−
∑
i
=
1
k
p
r
o
j
η
i
v
=
v
−
∑
i
=
1
k
⟨
v
,
η
i
⟩
η
i
{\displaystyle {\boldsymbol {\beta }}={\boldsymbol {v}}-\sum _{i=1}^{k}\mathrm {proj} _{{\boldsymbol {\eta }}_{i}}\,{\boldsymbol {v}}={\boldsymbol {v}}-\sum _{i=1}^{k}\langle {\boldsymbol {v}},{\boldsymbol {\eta }}_{i}\rangle {\boldsymbol {\eta }}_{i}}
V
k
{\displaystyle {\boldsymbol {V}}^{k}}
β
{\displaystyle {\boldsymbol {\beta }}}
V
k
{\displaystyle {\boldsymbol {V}}^{k}}
η
i
{\displaystyle {\boldsymbol {\eta }}_{i}}
β
{\displaystyle {\boldsymbol {\beta }}}
η
k
+
1
=
β
‖
β
‖
=
β
⟨
β
,
β
⟩
{\displaystyle {\boldsymbol {\eta }}_{k+1}={\frac {\boldsymbol {\beta }}{\|{\boldsymbol {\beta }}\|}}={\frac {\boldsymbol {\beta }}{\sqrt {\langle {\boldsymbol {\beta }},{\boldsymbol {\beta }}\rangle }}}}
那么
{
η
1
,
…
,
η
k
,
η
k
+
1
}
{\displaystyle \{{\boldsymbol {\eta }}_{1},\ldots ,{\boldsymbol {\eta }}_{k},{\boldsymbol {\eta }}_{k+1}\}}
V
k
{\displaystyle {\boldsymbol {V}}^{k}}
v
{\displaystyle {\boldsymbol {v}}}
s
p
a
n
{
v
,
η
1
,
.
.
.
,
η
k
}
{\displaystyle \mathrm {span} \{{\boldsymbol {v}},{\boldsymbol {\eta }}_{1},...,{\boldsymbol {\eta }}_{k}\}}
根据上述分析,对于向量组
{
v
1
,
…
,
v
m
}
{\displaystyle \{{\boldsymbol {v}}_{1},\ldots ,{\boldsymbol {v}}_{m}\}}
V
m
{\displaystyle {\boldsymbol {V}}^{m}}
m
<
n
{\displaystyle m<n}
v
1
{\displaystyle {\boldsymbol {v}}_{1}}
s
p
a
n
{
v
1
}
{\displaystyle \mathrm {span} \{{\boldsymbol {v}}_{1}\}}
v
1
{\displaystyle {\boldsymbol {v}}_{1}}
s
p
a
n
{
v
1
}
{\displaystyle \mathrm {span} \{{\boldsymbol {v}}_{1}\}}
V
n
{\displaystyle {\boldsymbol {V}}^{n}}
格拉姆-施密特正交化 。
首先需要确定已有基底向量的顺序,不妨设为
{
v
1
,
…
,
v
n
}
{\displaystyle \{{\boldsymbol {v}}_{1},\ldots ,{\boldsymbol {v}}_{n}\}}
β
1
=
v
1
,
{\displaystyle {\boldsymbol {\beta }}_{1}={\boldsymbol {v}}_{1},}
η
1
=
β
1
‖
β
1
‖
{\displaystyle {\boldsymbol {\eta }}_{1}={{\boldsymbol {\beta }}_{1} \over \|{\boldsymbol {\beta }}_{1}\|}}
β
2
=
v
2
−
⟨
v
2
,
η
1
⟩
η
1
,
{\displaystyle {\boldsymbol {\beta }}_{2}={\boldsymbol {v}}_{2}-\langle {\boldsymbol {v}}_{2},{\boldsymbol {\eta }}_{1}\rangle {\boldsymbol {\eta }}_{1},}
η
2
=
β
2
‖
β
2
‖
{\displaystyle {\boldsymbol {\eta }}_{2}={{\boldsymbol {\beta }}_{2} \over \|{\boldsymbol {\beta }}_{2}\|}}
β
3
=
v
3
−
⟨
v
3
,
η
1
⟩
η
1
−
⟨
v
3
,
η
2
⟩
η
2
,
{\displaystyle {\boldsymbol {\beta }}_{3}={\boldsymbol {v}}_{3}-\langle {\boldsymbol {v}}_{3},{\boldsymbol {\eta }}_{1}\rangle {\boldsymbol {\eta }}_{1}-\langle {\boldsymbol {v}}_{3},{\boldsymbol {\eta }}_{2}\rangle {\boldsymbol {\eta }}_{2},}
η
3
=
β
3
‖
β
3
‖
{\displaystyle {\boldsymbol {\eta }}_{3}={{\boldsymbol {\beta }}_{3} \over \|{\boldsymbol {\beta }}_{3}\|}}
⋮
{\displaystyle \vdots }
⋮
{\displaystyle \vdots }
β
n
=
v
n
−
∑
i
=
1
n
−
1
⟨
v
n
,
η
i
⟩
η
i
,
{\displaystyle {\boldsymbol {\beta }}_{n}={\boldsymbol {v}}_{n}-\sum _{i=1}^{n-1}\langle {\boldsymbol {v}}_{n},{\boldsymbol {\eta }}_{i}\rangle {\boldsymbol {\eta }}_{i},}
η
n
=
β
n
‖
β
n
‖
{\displaystyle {\boldsymbol {\eta }}_{n}={{\boldsymbol {\beta }}_{n} \over \|{\boldsymbol {\beta }}_{n}\|}}
这样就得到
s
p
a
n
{
v
1
,
…
,
v
n
}
{\displaystyle \mathrm {span} \{{\boldsymbol {v}}_{1},\ldots ,{\boldsymbol {v}}_{n}\}}
{
β
1
,
…
,
β
n
}
{\displaystyle \{{\boldsymbol {\beta }}_{1},\ldots ,{\boldsymbol {\beta }}_{n}\}}
{
η
1
,
…
,
η
n
}
{\displaystyle \{{\boldsymbol {\eta }}_{1},\ldots ,{\boldsymbol {\eta }}_{n}\}}
现在要用格拉姆-施密特变换求解矩阵
A
{\displaystyle A}
Q
R
{\displaystyle QR}
A
=
[
1
2
4
0
0
5
0
3
6
]
{\displaystyle A={\begin{bmatrix}1&2&4\\0&0&5\\0&3&6\\\end{bmatrix}}}
令,
a
=
[
1
,
0
,
0
]
{\displaystyle a=[1,0,0]}
q
1
=
a
|
|
a
|
|
=
[
1
0
0
]
{\displaystyle q_{1}={\frac {a}{||a||}}={\begin{bmatrix}1\\0\\0\\\end{bmatrix}}}
q
2
^
=
b
−
(
b
∗
q
1
)
q
1
=
[
2
0
3
]
−
2
[
1
0
0
]
=
[
0
0
3
]
{\displaystyle {\hat {q_{2}}}=b-(b*q_{1})q_{1}={\begin{bmatrix}2\\0\\3\\\end{bmatrix}}-2{\begin{bmatrix}1\\0\\0\\\end{bmatrix}}={\begin{bmatrix}0\\0\\3\\\end{bmatrix}}}
q
2
=
q
2
^
|
|
q
2
^
|
|
=
[
0
0
1
]
{\displaystyle q_{2}={\frac {\hat {q_{2}}}{||{\hat {q_{2}}}||}}={\begin{bmatrix}0\\0\\1\\\end{bmatrix}}}
q
3
^
=
c
−
(
c
∗
q
1
)
q
1
−
(
c
∗
q
2
)
q
2
=
[
4
5
6
]
−
4
[
1
0
0
]
−
6
[
0
0
1
]
=
[
0
5
0
]
{\displaystyle {\hat {q_{3}}}=c-(c*q_{1})q_{1}-(c*q_{2})q_{2}={\begin{bmatrix}4\\5\\6\\\end{bmatrix}}-4{\begin{bmatrix}1\\0\\0\\\end{bmatrix}}-6{\begin{bmatrix}0\\0\\1\\\end{bmatrix}}={\begin{bmatrix}0\\5\\0\\\end{bmatrix}}}
q
3
=
q
3
^
|
|
q
3
^
|
|
=
[
0
1
0
]
{\displaystyle q_{3}={\frac {\hat {q_{3}}}{||{\hat {q_{3}}}||}}={\begin{bmatrix}0\\1\\0\\\end{bmatrix}}}
那么可知,
Q
=
[
1
0
0
0
0
1
0
1
0
]
{\displaystyle Q={\begin{bmatrix}1&0&0\\0&0&1\\0&1&0\\\end{bmatrix}}}
由
A
=
Q
R
{\displaystyle A=QR}
R
=
[
1
2
4
0
3
6
0
0
5
]
{\displaystyle R={\begin{bmatrix}1&2&4\\0&3&6\\0&0&5\\\end{bmatrix}}}
MATLAB以qr函数来执行QR分解法,其语法为
[
Q
,
R
]
=
q
r
(
A
)
{\displaystyle [Q,R]=qr(A)}
其中Q代表正规正交矩阵,
而R代表上三角形矩阵。 此外,原矩阵A不必为正方矩阵;
如果矩阵A大小为
m
×
n
{\displaystyle m\times n}
m
×
m
{\displaystyle m\times m}
m
×
n
{\displaystyle m\times n}
对于直接求解线性方程组的逆,用QR分解的方法求解会更具有数据的稳定性。
对于求解一个线性系统
A
x
=
b
{\displaystyle Ax=b}
A
{\displaystyle A}
m
×
n
{\displaystyle m\times n}
如果
m
≤
n
{\displaystyle m\leq n}
A
T
=
Q
R
{\displaystyle A^{T}=QR}
Q
T
=
Q
−
1
{\displaystyle Q^{T}=Q^{-1}}
R
{\displaystyle R}
R
=
[
R
1
0
]
{\displaystyle R={\begin{bmatrix}R_{1}\\0\end{bmatrix}}}
R
1
{\displaystyle R_{1}}
R
{\displaystyle R}
x
=
Q
[
(
R
1
T
)
−
1
b
0
]
{\displaystyle x=Q{\begin{bmatrix}\left(R_{1}^{\textsf {T}}\right)^{-1}b\\0\end{bmatrix}}}
如果
m
>
n
{\displaystyle m>n}
A
=
Q
R
{\displaystyle A=QR}
Q
T
=
Q
−
1
{\displaystyle Q^{T}=Q^{-1}}
|
|
A
x
^
−
b
|
|
{\displaystyle ||A{\hat {x}}-b||}
x
^
=
R
1
−
1
(
Q
1
T
b
)
{\displaystyle {\hat {x}}=R_{1}^{-1}\left(Q_{1}^{\textsf {T}}b\right)}