자이로스코프
Gyroscope
자이로스코프(고대 그리스어 γῦο gG gros, "circle"과 "κοπέωωωωωωωωωωωωωωωωωωωωω 스코페오, "to look")는 방향과 각속도를 측정하거나 유지하는 데 사용되는 장치다.[1][2]회전축(회전축)이 자유자재로 어떤 방향도 스스로 가정할 수 있는 회전휠이나 원반이다.회전할 때, 각운동량 보존에 따라 이 축의 방향은 마운팅의 기울기 또는 회전에 영향을 받지 않는다.
다른 작동 원리에 기반한 자이로스코프도 존재한다. 예를 들어 전자 장치(자이로미터라고도 함), 솔리드 스테이트 링 레이저, 광섬유 자이로스코프, 극도로 민감한 양자 자이로스코프에서 찾을 수 있다.[3]
자이로스코프 적용은 허블 망원경이나 물에 잠긴 잠수함의 강철 선체 내부와 같은 관성 항법 시스템을 포함한다.자이로스코프는 정확성 때문에 터널 채굴의 방향을 유지하기 위해 자이로테오돌라이트에도 사용된다.[4]자이로스코프는 자기 나침반(선박, 항공기 및 우주선, 일반적으로 차량)을 보완하거나 대체하는 자이로 컴퍼스를 건설하여 안정성을 보조하거나(자전거, 오토바이 및 선박) 관성 유도 시스템의 일부로 사용할 수 있다.
MEMS 자이로스코프는 스마트폰과 같은 일부 가전제품에서 인기가 있다.
설명 및 다이어그램

자이로스코프는 바퀴가 한 축을 중심으로 회전할 수 있도록 회전 지지대를 제공하는 두 개 또는 세 개의 짐벌에 장착된 바퀴로 구성된다.직교 피벗 축이 있는 다른 하나에 장착된 3개의 짐벌 세트를 사용하여 가장 안쪽 짐벌에 장착된 휠이 지지대 방향과 독립적으로 유지되는 방향을 가질 수 있다.
두 개의 짐바브웨가 있는 자이로스코프의 경우, 지지대에 의해 결정된 자신의 평면에서 축을 중심으로 회전하도록 자이로스코프 프레임인 외부 짐볼을 탑재한다.이 바깥쪽 짐발은 회전 자유도가 1도이고 축은 1도 없다.두 번째 짐벌, 내측 짐벌은 자이로스코프 프레임(외측 짐벌)에 탑재되어 자이로스코프 프레임의 중추축(외측 짐벌)에 항상 수직인 자신의 평면에서 축을 중심으로 회전한다.이 내면의 짐벌은 2도의 회전 자유도를 가지고 있다.
스피닝 휠의 차축은 스핀 축을 정의한다.로터는 내부 짐벌의 축에 항상 수직인 축을 중심으로 회전하도록 제한된다.그래서 로터는 3도 회전 자유도를 가지고 있고 그 축은 2도 회전 자유도를 가지고 있다.휠은 출력 축에 대한 반력에 의해 입력 축에 가해지는 힘에 반응한다.
자이로스코프의 행동은 자전거의 앞바퀴를 고려해 보면 가장 쉽게 이해할 수 있다.바퀴의 상단이 왼쪽으로 움직이도록 바퀴를 수직으로부터 멀리 기울이면 바퀴의 앞쪽 림도 왼쪽으로 돌아간다.즉, 회전휠의 한 축에서 회전하면 세 번째 축이 회전하게 된다.
자이로스코프 플라이휠은 출력 김발이 자유형인지 고정형인지에 따라 출력 축을 중심으로 굴리거나 저항한다.일부 자유출력 짐벌 장치의 예로는 우주선이나 항공기에서 피치, 롤링 및 요(Yaw) 자세 각도를 감지하거나 측정하는 데 사용되는 자세 참조 자이로스코프가 있다.

로터의 무게중심은 고정된 위치에 있을 수 있다.로터는 동시에 한 축을 중심으로 회전하며 다른 두 축을 중심으로 진동할 수 있으며, 고정점(로터 스핀에 의한 고유 저항은 제외)에 대해서는 어느 방향으로도 자유롭게 회전할 수 있다.일부 자이로스코프에는 하나 이상의 원소를 대체하는 기계적 등가물이 있다.예를 들어, 회전 로터는 김벌에 장착되지 않고 유체에 매달릴 수 있다.제어 모멘트 자이로스코프(CMG)는 우주선에서 자이로스코프 저항력을 이용해 원하는 자세 각도나 방향을 가리키기 위해 사용하는 고정 출력 짐벌 장치의 예다.
특수한 경우에 외부 짐벌(또는 그와 동등한 것)을 생략하여 로터가 2도 자유도만 갖도록 할 수 있다.다른 경우 로터의 무게중심이 진동 축에서 상쇄될 수 있으므로 로터의 무게중심과 로터의 서스펜션 중심이 일치하지 않을 수 있다.
역사
본질적으로 자이로스코프는 한 쌍의 김발과 결합된 상판이다.팽이는 고대 그리스, 로마, 중국을 포함한 많은 다른 문명에서 발명되었다.[5]이 중 대부분은 계측기로 활용되지 않았다.
자이로스코프와 유사한 것으로 알려진 최초의 기구는 1743년 존 서슨에 의해 발명되었다.그것은 안개가 끼거나 안개가 낀 조건에서 수평선을 찾기 위해 수평선으로 사용되었다.
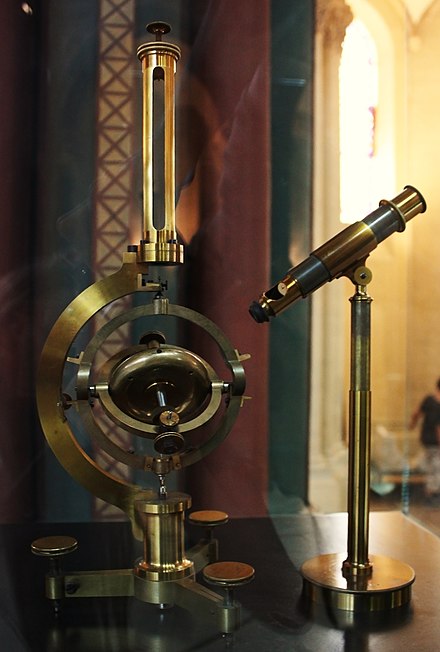
실제 자이로스코프처럼 사용된 최초의 악기는 1817년 독일의 Johann Bohnenberger에 의해 만들어졌다.처음에 그는 그것을 "기계"라고 불렀다.[6][7][8]보넨버거의 기계는 회전하는 거대한 구를 기반으로 했다.[9]1832년 미국인 월터 R. 존슨은 회전 디스크를 기반으로 한 비슷한 장치를 개발했다.[10][11]파리의 에콜 폴리테크니크에서 일하는 프랑스의 수학자 피에르 시몬 라플레이스가 이 기계를 교재로 사용할 것을 권고하여 레옹 푸코의 주목을 받게 되었다.[12]1852년 푸코는 지구의 자전과 관련된 실험에 그것을 사용했다.[13][14]마찰이 회전로를 늦추기 전 8~10분 동안 볼 수 있었던 지구의 자전([15]그리스의 자전, 원 또는 회전)을 보기 위한 실험에서 이 장치에 현대적인 이름을 붙인 것은 푸코였다.
1860년대에 전기 모터의 등장으로 자이로스코프가 무한히 회전할 수 있게 되었다; 이것은 최초의 시제품 헤더 표시기와 다소 복잡한 장치인 자이로 컴퍼스로 이어졌다.최초의 기능성 자이로 컴퍼스는 1904년 독일의 발명가 헤르만 안슈츠-캄프페에 의해 특허를 받았다.[16]미국의 엘머 슈페리는 그 해 말에 자신의 디자인을 따랐고, 다른 나라들은 곧 이 발명의 군사적 중요성, 즉 해군력이 군사력의 가장 중요한 척도였다는 것을 깨닫고 그들만의 자이로스코프 산업을 만들었다.스페리 자이로스코프 회사는 빠르게 확장되어 항공기와 해군 안정기도 제공했고, 다른 자이로스코프 개발자들도 그 뒤를 따랐다.[17]
1917년 인디애나폴리스의 챈들러 회사는 당기는 끈과 받침대를 가진 장난감 자이로스코프인 "Chandler 자이로스코프"를 만들었다.챈들러는 1982년 회사가 TEDCO에 의해 구매될 때까지 이 장난감을 계속 생산했다.챈들러 장난감은 오늘날에도 TEDCO에 의해 생산되고 있다.[18]
20세기 초 수십 년 동안, 다른 발명가들은 정확한 가속도 측정을 수행할 수 있는 안정된 플랫폼을 만들어 초기 블랙박스 항법 시스템의 기초로 자이로스코프를 사용하려고 시도(실패)했다.탄도미사일용 관성항법시스템 개발에도 이후 유사한 원칙이 채택됐다.[19]
제2차 세계 대전 동안 자이로스코프는 항공기와 대공포 조준경의 주요 구성요소가 되었다.[20]전쟁 후 유도탄과 무기항법장치용 자이로스코프 소형화 경쟁으로 무게는 3온스(85g) 미만, 지름은 약 1인치(2.5cm)인 이른바 중형 자이로스코프가 개발·제조됐다.이러한 소형화된 자이로스코프 중 일부는 10초 이내에 분당 2만 4천 바퀴의 속도에 도달할 수 있다.[21]
자이로스코프는 계속 공학적인 도전이다.예를 들어 액슬 베어링은 매우 정확해야 한다. -(\디스플레이 스타일 이상의 정확도(2.5nm)가 필요하므로 베어링에 의도적으로 소량의 마찰을 도입한다.[22]
태블릿, 스마트폰,[24] 스마트워치 등 휴대용 전자기기에도 [23]3축 MEMS 기반 자이로스코프가 활용되고 있다.[25]이를 통해 이전 세대의 장치에서 사용할 수 있는 3축 가속 감지 기능이 추가된다.이 센서는 함께 6개의 구성 요소 동작 감지, 즉 X, Y, Z 이동을 위한 가속도계와 공간에서의 회전 범위와 속도를 측정하기 위한 자이로스코프(롤, 피치 및 요)를 제공한다.일부 장치는[26][27] 추가로 자력계를 통합하여 지구 자기장에 상대적인 절대 각도 측정을 제공한다.새로운 MEMS 기반 관성 측정 장치는 단일 통합 회로 패키지에 최대 9개 축의 감지 기능을 모두 통합하여 저렴하고 널리 사용할 수 있는 모션 감지 기능을 제공한다.[28]
자이로스코프 원리
회전하는 모든 물체는 자이로스코프 특성을 가지고 있다.어떤 자이로스코프 운동에서 물체가 경험할 수 있는 주요 특성은 공간의 경직성과 과도현상이다.
공간의 경직성
우주의 경직성은 자이로스코프가 회전하는 평면에서 지구의 자전에 영향을 받지 않고 고정된 위치에 머물러 있다는 원리를 설명한다.예를 들어 자전거 바퀴.
전처리
일정한 사전 처리라고도 하는 간단한 사전 처리 사례는 모멘트와 관련하여 다음과 같이 설명할 수 있다.
여기서 ϕ 은(는) 사전 처리를 나타내고, ψ ′ 은(는) 스핀으로 나타내며, 은는) 각 축을 따라 관성을 나타낸다.이 관계는 Y 축과 Z 축을 따라가는 모멘트가 0일 경우에만 유효하다.
The equation can be further reduced noting that the angular velocity along the z-axis is equal to the sum of the Precession and the Spin: , Where represents the angular velocity along the z axis.
또는
자이로스코프 프리세션은 토크로 유도된다.동일한 적용 토크로 생성된 각운동량과 각속도의 변화 속도로 설명된다.이 물리적 현상은 겉으로 보기에 불가능해 보이는 동적 발생을 초래한다.예를 들어, 회전하는 팽이.이 자이로스코프 과정은 비행기와 헬리콥터와 같은 많은 항공우주 환경에서 그들을 원하는 방향으로 인도하는 데 도움을 준다.
현대 용법
스테디캠
스테디캠은 추가 안정화를 위해 두 개의 자이로스코프와 함께 제다이의 귀환 촬영 중에 고속 자전거 추적을 위한 배경판을 촬영하기 위해 사용되었다.스테디캠의 발명가 개럿 브라운은 레드우드 숲을 거닐며 초당 한 프레임씩 카메라를 작동시켰다.초속 24프레임으로 투사했을 때 위험한 속도로 공중을 날아가는 느낌을 주었다.[30][31]
제목 표시기
방향 지시등 또는 방향 자이로에는 북쪽을 가리키며 수평으로 설정된 회전축이 있다.자석 나침반과 달리 북쪽을 추구하지 않는다.예를 들어 비행기에서 사용될 때, 그것은 천천히 북쪽으로부터 떠내려갈 것이며, 자기 나침반을 기준으로 하여 주기적으로 방향을 바꿀 필요가 있을 것이다.[32]
자이로 컴퍼스
방향 자이로나 방향 지시등과는 달리 자이로 컴퍼스는 북쪽을 찾는다.그것은 자성북보다는 축에 대한 지구의 자전을 감지하고 진정한 북쪽을 추구한다.자이로 컴퍼스에는 보통 갑작스러운 움직임으로 인한 재교정 시 오버슈트를 방지하기 위해 댐핑이 내장되어 있다.
가속도계
물체의 가속도를 결정하고 시간에 따른 통합을 통해 물체의 속도를 계산할 수 있다.다시 통합하면 위치를 결정할 수 있다.가장 단순한 가속도계는 수평 이동이 자유로운 무게로 스프링에 부착되며 스프링의 장력을 측정하는 장치다.이것은 역작용력을 도입하여 무게를 뒤로 밀어내고 무게가 움직이지 않도록 하는 데 필요한 힘을 측정함으로써 개선될 수 있다.보다 복잡한 설계는 축 중 하나에 중량을 갖는 자이로스코프로 구성된다.장치는 가속될 때 중량에 의해 발생하는 힘에 반응하며, 그 힘을 통합하여 속도를 생성한다.[33]
변형
자이로스타트
자이로스타트는 단단한 케이스에 숨겨져 있는 거대한 플라이휠로 구성되어 있다.[34][35]테이블 위에서 또는 다양한 형태의 정지 또는 지지와 함께 그것의 행동은 빠르게 회전할 때 내부 보이지 않는 플라이휠의 정전기적 행동 때문에 정적인 평형이라는 일반적인 법칙의 기이한 반전을 보여주는 역할을 한다.첫 번째 자이로스타트는 켈빈 경이 포장도로 위의 팽이 돌거나 도로 위의 자전거처럼 수평면에서 자유롭게 돌아다닐 때 회전하는 신체의 더 복잡한 운동 상태를 설명하기 위해 고안한 것이다.켈빈은 또한 물질과 에테르 탄력에 대한 기계적 이론을 개발하기 위해 자이로스타트를 이용했다.[36]현대 연속체 역학에는 켈빈 경의 사상에 근거한 다양한 모델이 있다.그것들은 특정 유형의 코세라트 이론(외젠 코세라트와 프랑수아 코세라트가 처음으로 제안함)을 대표하는데, 다른 복잡한 매체뿐만 아니라 인공적으로 만들어진 스마트 재료에 대한 설명에도 사용할 수 있다.그 중 하나인 이른바 켈빈 매질(Kelvin's medium)은 퀘이심자기학 근사치에서 자기 포화 상태에 가까운 자기 절연체와 같은 방정식을 가지고 있다.[37]
현대에, 자이로스타트 개념은 궤도를 선회하는 우주선과 위성을 위한 자세 제어 시스템의 설계에 사용된다.[38]예를 들어, 미르 우주정거장에는 자이로다인 또는 제어 모멘트 자이로로 알려진 세 쌍의 내부에 장착된 플라이휠이 있었다.[39]
물리학에는 역동적인 방정식이 교로스타트의 운동 방정식을 닮은 몇 개의 계통이 있다.[40]예로는 충치는 inviscid, 비압축성, 동일한 liquid,[41]으로 가득 찬 다부진 몸을 포함하는 정적 평형 형상의 강세 탄력 있는 제어봉 삽입 elastica theory,[42]는 양극화 현상 역동성의 가벼운 펄스 전파를 통해 비선형 medium,[43]은 로렌츠 방정식에서 카오스 theory,[44]및 운동의 이온에. 페닝 트랩질량 [45]분광계
MEMS 자이로스코프
마이크로 전자기계 시스템(MEMS) 자이로스코프는 전자기기에서 발견되는 소형화된 자이로스코프다.푸코 진자의 사상을 취하여 진동하는 원소를 사용한다.이러한 종류의 자이로스코프는 처음에는 군사용으로 사용되었지만, 그 이후 상업적 사용을 증가시키기 위해 채택되었다.[46]
HRG
와인글라스 자이로스코프[contradictory] 또는 버섯 자이로라고도 불리는 반구형 공명형 자이로스코프(HRG)는 굵은 줄기에 의해 고정된 얇은 고체 상태의 반구형 껍질을 사용한다.이 껍질은 전극에 의해 생성되는 정전기력에 의해 휨 공진으로 구동되며, 전극은 셸을 둘러싸고 있는 별도의 퓨전 사분위 구조물에 직접 침전된다.자이로스코프 효과는 휨 입자파의 관성적 특성에서 얻는다.[citation needed]
VSG 또는 CVG
코리올리스 진동 자이로스코프(CVG)라고도 불리는 진동 구조물 자이로스코프(VSG)는 서로 다른 금속 합금으로 만들어진 공명기를 사용한다.[47]저정확도, 저비용 MEMS 자이로스코프와 고정확도, 고비용 광섬유 자이로스코프 사이의 위치를 차지한다.온도에 따른 드리프트와 제어신호의 불안정성을 줄이기 위해 저내구성 댐핑 재료, 공명 진공화, 디지털 전자장치를 사용하여 정확도 파라미터를 높인다.[48]
HRG와 같은 정밀한 센서에는 고품질 와인글라스 공명기가 사용된다.[49]
DTG
동적 동조 자이로스코프(DTG)는 굴곡 피벗이 있는 범용 조인트에 의해 매달린 로터다.[50]휨 스프링 강성은 스핀 속도와 무관하다.그러나 짐벌의 동적 관성(자이로스코프 반응 효과로부터)은 스핀 속도의 제곱에 비례하는 부 스프링 강성을 제공한다(Howe and Savet, 1964; Lawrence, 1998).따라서 튜닝 속도라고 불리는 특정 속도에서 두 순간은 서로를 취소하여 이상적인 자이로스코프에 필요한 조건인 로터를 토크로부터 해방시킨다.
링 레이저 자이로스코프
링 레이저 자이로스코프는 두 개의 개별 빔으로 분할된 빔의 이동 간섭 패턴을 측정하여 회전을 측정하는 Sagnac 효과에 의존한다.
1983년 보잉 757-200이 서비스를 시작했을 때 최초의 적합한 링 레이저 자이로스코프를 장착했다.이 자이로스코프는 개발하는데 수년이 걸렸고, 허니웰과 보잉의 엔지니어들과 매니저들에 의해 생산 준비가 되었다고 여겨지기 전까지 실험 모델들은 많은 변화를 겪었다.기계식 자이로스코프와의 경쟁으로 계속 발전한 결과였다.허니웰이 레이저 자이로 개발을 선택한 이유는 기계식 자이로스코프 라인이 성공하지 못해 자신들과 경쟁하지 않기 때문이다.그들이 해결해야 할 첫 번째 문제는 레이저 자이로스 회전이 일정 최소치 이하인 경우, 두 빔이 결합 오실레이터처럼 작용하여 서로의 주파수를 정합화 방향으로 끌어당겨 0 출력을 내는 "락인"이라는 문제 때문에 전혀 감지할 수 없다는 것이었다.자이로가 락인(lock-in)에 정착하지 못하도록 빠르게 흔들어 놓는 것이 해결책이었다.역설적으로 너무 규칙적인 디더링 동작은 기기가 흔들림 동작의 맨 끝에 정지해 있을 때 짧은 기간 동안 잠금을 발생시켰다.이것은 진동에 무작위적인 백색 소음을 가함으로써 치료되었다.블록의 소재도 헬륨 누출로 석영에서 오웬스 코닝이 만든 새로운 유리 세라믹 세르비트로 바뀌었다.[51]
광섬유 자이로스코프
광섬유 자이로스코프는 또한 기계적 회전을 감지하기 위해 빛의 간섭을 이용한다.분할빔의 2할선은 5km 길이의 광케이블 코일을 타고 반대 방향으로 이동한다.링 레이저 자이로스코프처럼 Sagnac 효과를 활용한다.[52]
런던 모멘트
런던 모멘트 자이로스코프는 양자-기계적 현상에 의존하며, 회전하는 초전도체는 자이로스코프 로터의 스핀 축과 정확히 일치하는 축을 가진 자기장을 생성한다.자력계는 자전 축을 결정하기 위해 보간되는 생성된 장의 방향을 결정한다.이러한 유형의 자이로스코프는 매우 정확하고 안정적일 수 있다.예를 들어, 중력 탐사선 B 실험에 사용된 것들은 1년 동안 0.5 밀리초(1.4×10도−7 또는 약 2.4×10−9 라디안) 이상으로 자이로스코프 스핀 축 방향의 변화를 측정했다.[53]이는 32km(20mi) 떨어진 곳에서 바라본 사람의 머리카락 너비 각이 갈라진 것과 맞먹는다.[54]
GP-B 자이로(GP-B 자이로)는 퓨전 석영으로 만들어진 거의 완벽한 구형 회전 질량으로 구성되며, 이는 니오비움 초전도 물질의 얇은 층에 유전체 지지력을 제공한다.기존 베어링에서 발견되는 마찰을 제거하기 위해 로터 어셈블리는 6개의 전극으로부터 전기장에 의해 중앙에 위치한다.로터를 4,000RPM으로 만드는 헬륨 제트에 의한 초기 스핀업 후, 광택된 자이로스코프 하우징은 로터의 드래그를 더욱 줄이기 위해 초고진공 진공으로 대피한다.서스펜션 전자 장치가 동력을 유지한다면, 극한 회전 대칭, 마찰 부족, 저항력 등이 로터의 각운동량을 통해 로터가 약 15,000년 동안 회전하도록 할 수 있다.[55]
자이로스코프를 감시하기 위해 하나의 양자, 즉 약 2 ×10−15 Wb만큼 작은 변화를 구별할 수 있는 민감한 DC SQUID가 사용된다.로터의 방향에서 전열 또는 기울어짐은 런던 모멘트 자기장이 하우징에 상대적으로 이동하게 한다.이동장은 하우징에 고정된 초전도 픽업 루프를 통과하여 작은 전류를 유도한다.전류는 션트 저항을 가로질러 전압을 생성하며, 마이크로프로세서에 의해 구형 좌표로 분해된다.이 시스템은 로터의 로렌츠 토크를 최소화하도록 설계되었다.[56][57]
기타 예
헬리콥터
헬리콥터의 주 회전자는 자이로스코프처럼 작용한다.그것의 움직임은 회전하는 물체에 가해지는 힘이 약 90도 후에 최대 반응을 가질 것이라는 개념인 자이로스코프 프리세션의 원리에 의해 영향을 받는다.다른 강한 힘이 작용하고 있을 때 반응은 90도와 다를 수 있다.[58]방향을 바꾸려면 헬리콥터가 피치 각도와 공격 각도를 조정해야 한다.[59]
자이로 X
1967년 알렉스 트레물리스와 토마스 서머스가 만든 시제품 차량.그 차는 자이로스코프 전 과정을 이용해 두 개의 바퀴를 달린다.차량의 후드 아래 짐벌 하우징에 장착된 플라이휠로 구성된 어셈블리가 대형 자이로스코프 역할을 했다.플라이휠은 유압 펌프에 의해 회전되어 차량에 자이로스코프 효과를 발생시켰다.전처리 램은 자이로스코프를 회전시켜 전처리력의 방향을 변경하여 차량 불균형을 유발하는 힘을 상쇄하는 역할을 했다.이 독특한 시제품은 현재 테네시주 내슈빌에 있는 레인 모터 박물관에 있다.[60]
가전제품

나침반, 항공기, 컴퓨터 포인팅 장치 등에 사용되는 것 외에도, 자이로스코프가 가전제품에 도입되었다.가전제품에서 자이로스코프를 처음 사용하거나 사용한 것은 애플 아이폰에서 스티브 잡스에 의해 대중화되었다.
자이로스코프는 방향과 회전을 계산할 수 있기 때문에, 디자이너들은 그것들을 현대 기술에 접목시켰다.자이로스코프의 통합으로 다수의 스마트폰 내에서 이전의 단독 가속도계보다 3D 공간 내에서 더 정확한 움직임을 인식할 수 있게 되었다.가전제품의 자이로스코프는 보다 강력한 방향감각과 동작감각을 위해 가속도계와 자주 결합된다.삼성 갤럭시 노트 4, [61]HTC 타이탄,[62] 넥서스 5, 아이폰 5s,[63] 노키아 808 퓨어뷰[64], 소니 엑스페리아 등 스마트폰, 플레이스테이션3 컨트롤러, 위 리모컨 등 게임기 주변기기, 오큘러스 리프트 등 가상현실 세트 등이 대표적인 애플리케이션이다.[65]
닌텐도는 "Wii MotionPlus"[66]라고 불리는 추가 하드웨어에 의해 Wii 콘솔의 Wii Remote 컨트롤러에 자이로스코프를 통합했다.회전과 흔들림 시 움직임을 감지하는 3DS, Wii U 게임패드, 닌텐도 스위치 조이콘 컨트롤러에도 포함돼 있다.
크루즈선은 자이로스코프를 이용해 셀프 레벨링 풀 테이블과 같은 동작에 민감한 장치의 수평을 맞춘다.[67]
자전거 바퀴에 삽입된 전동 플라이휠 자이로스코프는 훈련용 바퀴의 대안으로 판매된다.[68]포토스phere나 360 카메라와 같은 안드로이드폰의 일부 기능과 VR 기기를 사용하기 위해서는 휴대전화에 자이로스코프 센서가 없으면 작동하지 않는다.[69]
참고 항목
메모들
- ^ "Gyroscope". Oxford Dictionaries. Archived from the original on 5 May 2015. Retrieved 4 May 2015.
- ^ "자이로스코프 2008년 4월 30일 웨이백 기계에 보관" Sandor Kabai, Wolfram 데모 프로젝트.
- ^ Tao W, 류 T, 정 R, 펑 H. 걸음걸이 분석 웨어러블 센서를 이용한 분석.센서(스위스 바젤).2012;12(2):2255-2283. doi:10.3390/s1202255.
- ^ "20 things you didn't know about tunnels". Discover. 29 April 2009. Archived from the original on 15 June 2009.
- ^ Range, Shannon K'doah; Mullins, Jennifer. "Brief History of Gyroscopes". Archived from the original on 10 July 2015.
- ^ Johann G. F. Bohnenberger (1817) "Beschreibung einer Maschine zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe, und der Veränderung der Lage der letzteren" (Description of a machine for the explanation of the laws of rotation of the Earth around its axis, and of the change of the orientation of the latter), Tübinger Blätter für Naturwissenschaften und Arzneikunde 2011년 7월 19일 웨이백 머신에 보관, vol. 3, 72-83페이지.
- ^ The French mathematician Poisson mentions Bohnenberger's machine as early as 1813: Simeon-Denis Poisson (1813) "Mémoire sur un cas particulier du mouvement de rotation des corps pesans" [Memoir on a special case of rotational movement of massive bodies], Journal de l'École Polytechnique, vol. 9, pages 247–262.온라인에서 이용 가능: Ion.org 2011년 7월 19일 웨이백 머신에 보관
- ^ Wagner, Jörg F.; Trierenberg, Andor (2014), Stein, Erwin (ed.), "The Machine of Bohnenberger", The History of Theoretical, Material and Computational Mechanics - Mathematics Meets Mechanics and Engineering, Lecture Notes in Applied Mathematics and Mechanics, Berlin, Heidelberg: Springer, pp. 81–100, doi:10.1007/978-3-642-39905-3_6, ISBN 978-3-642-39905-3, retrieved 20 February 2021
- ^ Bohnenberger의 악기 사진은 여기 온라인에서 볼 수 있다: Ion.org Wayback Machine ION Museum 2007년 9월 28일 보관:'보넨버거의 기계's Machine of Bohnenberger의 기계.
- ^ 월터 R. 존슨 (1832년 1월)"로타스코프라는 기구에 대한 설명으로 여러 현상을 보여주고 특정 회전 운동 법칙을 보여준다." 2016년 8월 19일 웨이백 머신, The American Journal of Science and Art, 제1시리즈, 제21권, 제2호, 제265-280쪽에 보관.
- ^ Drawings of Walter R. Johnson's gyroscope ("rotascope") were used to illustrate phenomena in the following lecture: E.S. Snell (1856) "On planetary disturbances," Archived 19 August 2016 at the Wayback Machine Board of Regents, Tenth Annual Report of the Board of Regents of the Smithsonian Institution.... (Washington, D.C.:코넬리어스 웬델, 1856쪽), 175~190쪽.
- ^ "Archived copy". Archived from the original on 28 September 2007. Retrieved 24 May 2007.
{{cite web}}: CS1 maint: 타이틀로 보관된 사본(링크) - ^ L. Foucault (1852) "Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre – Nouveaux signes sensibles du mouvement diurne" (On the phenomena of the orientation of rotating bodies carried along by an axis fixed to the surface of the earth – New perceptible signs of the daily movement), Comptes rendus hebdomaders des séance de l'Academie des Science (파리), 35권 424-427페이지.온라인(프랑스어):Gallica.bnf.fr Wayback Machine에 2012년 7월 16일 보관
- ^ 1852년, 독일의 정비공이자 전 중등학교 교사였던 프리드리히 페셀은 자이로스코프를 독자적으로 개발했다.See: (1) Julius Plücker (September 1853) "Über die Fessel'sche rotationsmachine", Annalen der Physik, vol. 166, no. 9, pages 174–177; (2) Julius Plücker (October 1853) "Noch ein wort über die Fessel'sche rotationsmachine", Annalen der Physik, vol. 166, no. 10, pages 348–351; (3) Charles Wheatstone (1864) "On Fessel's gyroscope" Archived 19 August2016년 웨이백 머신, 런던 왕립학회 회의록, 제7권 43-48쪽.
- ^ L. Foucault (1852) 콤프테스 렌두스..., 35권, 427쪽.
- ^ 헤르만 안슈츠카엠페와 프리드리히 폰 시라크, "크라이셀라파랏" (자이로스코프) 독일제국의 제182855호 (기호: 1904년 3월 27일; 발행: 1907년 4월 2일)
- ^ 맥켄지, 도널드발명 정확성: 핵미사일지도의 역사사회학.케임브리지: MIT 프레스, 1990. 페이지 31–40.ISBN 0-262-13258-3
- ^ Anon. "TEDCO Toys - Cool company history, great science kits". TEDCO Toys company website. O'Reilly Media Inc. Archived from the original on 9 March 2009. Retrieved 23 December 2010.
- ^ 맥켄지, 도널드발명 정확성: 핵미사일지도의 역사사회학.케임브리지: MIT 출판부, 1990. 페이지 40-42.ISBN 0-262-13258-3
- ^ 골드 샌더스의 웨이백 머신에 보관된 2011년 7월 10일, 1945년 7월
- ^ Magazines, Hearst (1 March 1954). "Popular Mechanics". Hearst Magazines. Archived from the original on 2 February 2017.
- ^ 파인만, 고틀립 & 레이튼 2013, 페이지 148–149.
- ^ "iPad - Compare Models". Apple. Archived from the original on 24 October 2012.
- ^ "iPhone 4 Gyroscope Teardown". 24 June 2010. Archived from the original on 24 November 2011. Retrieved 11 November 2011.
- ^ Kelon, Leo (9 September 2014). "Smartwatches: Specs and reviews for the leading models". Technology. BBC News. Archived from the original on 28 August 2015.
- ^ "Best Android phones with Gyroscope and Accelerator". AptGadget.com. 24 June 2018. Retrieved 9 December 2020.
- ^ "Basic Sensors in iOS". Archived from the original on 23 July 2015. Retrieved 23 July 2015.
- ^ "Archived copy". Archived from the original on 23 July 2015. Retrieved 23 July 2015.
{{cite web}}: CS1 maint: 타이틀로 보관된 사본(링크) - ^ Hibbeler, R.C (2016). Engineering Mechanics: Dynamics Fourteenth Edition. Hoboken, New Jersey: Pearson Prent